1. Принципы построения АЭП переменного тока с частотно-токовым управлением.
Частотно-токовое управление АД
При частотно-токовом управлении скольжение и потребляемый ток усиливаются в соответствии с механизмом, развиваемым двигателем. При этом может не регулироваться системой управления. Из-за этого отсутствуетрежим работы на упор, возможность регулирования момента и ускорения в переходных процессах.
Еще одним недостатком частотного управления явл. Сложность реализации закона регулирования, потокосцепление явл. Функцией момента.
Если при частотном регулировании основной закон ψ1=const то при частотно-токовом ψ2=const/
В общем случае амплитуда переменного тока регулируется в функции абсолютного скольжения (момента). Если принять за независимую переменную ток статора I1, то из Т-образной схемы замещения можно получитьвыражения для тока статора в функции абсолютного скольжения
I1=f(Sa)=I1xx*Xm*√(C(Sa)/D(Sa))
Так например если нужно получить φ=φ1=const, то приведенная зависимость будет представляться кривой, близкой к параболе
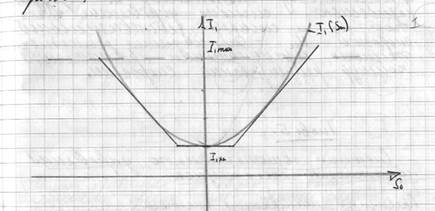
Подобная кривая можетбыть аппроксимирована отрезками для просто реализации функционального преобразователя
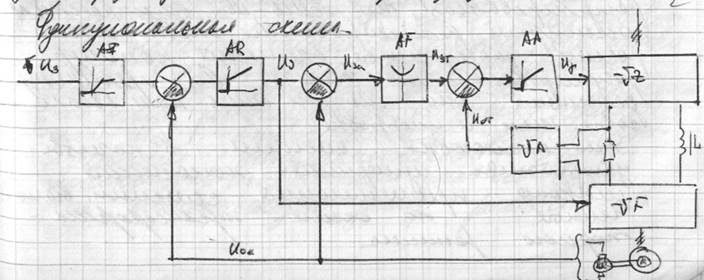
Сигнал задания тока статора вырабатывается функц. Преобр. Которыйреализует зависимость I1=f(Sa)
На вход функц. Преобр подается сигнал пропорциональный абсолютному значению. Он образуется разностью сигнала управления частотой U0 и сигнала действиеульной скорости Uос. Для получения достаточно жестких характеристик применяется контур регулирования скорости.
4. Схема и принцип действия АЭП намоточных устройств в
Функции механической мощности.
В процессе намотки полосы на барабан увеличивается диаметр рулона. При постоянной угловой скорости моталки с увеличением диаметра рулона растет скорость намотки, а следовательно, и натяжение полосы. Для сохранения в процессе намотки постоянства натяжения полосы следует с увеличением диаметра рулона уменьшает угловую скорость барабана моталки так, чтобы линейная скорость намотки оставалась неизменной. В процессе же размотки диаметр рулона уменьшается , поэтому для сохранения неизменной линейной скорости размотки следует увеличивать угловую скорость двигателя. Моталки современных станов холодной прокатки приводятся во вращение индивидуальными электродвигателями постоянного тока независимого возбуждения.Для поддержания заданного натяжения между клетью и моталкой , клетью и разматывателем применяются замкнутые системы автоматического регулирования с воздействием обычно на магнитный поток двигателя; регулируемой величиной является непосредственно измеряемое натяжение или косвенная величина, имеющая функциональную связь с натяжением. Пределы изменения потока двигателя при этом должны быть равны пределам изменения диаметра рулона.
На рис. приведена схема регулятора натяжения в функции мощности. Обмотка возбуждения генератора ОВГМ подключена на зажим электромашинного усилителя ЭМУ, имеющего три обмотки управления. Управляющая обмотка ОУ включается на разность напряжений тахогенераторов клети ТГК и моталки ТГМ. Последним является тахометрическим датчиком мощности. В качестве тахогенератора ТГМ используется машина постоянного тока небольшой мощности, жестко соединенная с валом двигателя моталки ДМ. Обмотка возбуждения ОВТГМ включается на напряжение, снимаемое с измерительного сопротивления R6.
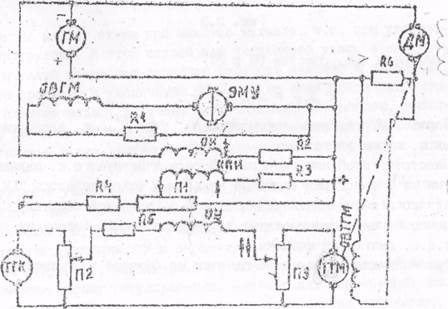
следовательно, ток возбуждения этой машины пропорционален току якоря двигателя моталки. Тогда ЭДС машины ТГМ будет пропорциональна произведению угловой скорости моталки на ток якоря Iя.
Eтгм≡ω*Iя
Двигатель моталки работает с постоянным магнитным потоком, поэтому
Eтгм≡ω*Iя≡ ω*М1≡Рэл
Рэл – электромагнитная мощность моталки.
Н.с. управляющей обмотки ОУ и , следовательно , э.д.с. ЭМУ пропорциональны разности напряжений, соответствующих заданной электромагнитной мощности двигателя моталки (Eтгк) и реальной электромагнитной мощности (Етгм).
При отклонении натяжения от заданной величины изменяется э.д.с. тахогенератора моталки ТГМ. Так как э.д.с тахогенератора клети ТГК при неизменной скорости прокатки постоянна, то изменение э.д.с тахогенератора ТГМ вызовет пропорциональное изменение н.с. управляющей обмотки ОУ. В результате на зажимах генератора ГМ появиться дополнительное напряжение того или иного знака, ограничивающее отклонение натяжения полосы.
Для создания натяжения при неподвижном стане используется обмотка предварительного натяжения ОПН усилителя ЭМУ.
Обмотка ОН осуществляет обратную связь по напряжению генератора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.