2. Выбор типоразмера электродвигателя.
2.1 Технические данные электродвигателя.
Выбранный нами электродвигатель имеет следующую маркировку и номинальные данные:
4АМН280М4
Pн = 160кВт; сosφ = 0.91;
η=0.935;
Uн=380 B;
n=1500 об/мин.
Пусковые свойства двигателя:
отношение начального пускового момента к номинальному
![]() ;
;
отношение минимального момента к номинальному:
![]() ;
;
номинальное скольжение ![]()
критическое скольжение ![]()
отношение начального пускового тока к номинальному:
![]()
Также приведём некоторые дополнительные данные:
Xμ = 4.6 о.е.
R1’= 0.018 о.е. R2’’= 0.017о.е.
X1’ = 0.107 о.е. X2’’= 0.15 о.е.
где:
Xμ – главное индуктивное сопротивление;
X1’ – индуктивное сопротивление рассеяния обмотки статора;
X2’’ – индуктивное сопротивление рассеяния обмотки ротора, приведённое к обмотке статора.
динамический момент инерции ротора J = 3.1 кг/м2;
2.2 Определение дополнительных данных для проектирования.
Номинальный фазный ток статора определяется по формуле:
I1н = Р2н / (3U1ф×h×cosj) =160000/(3×220×0.935×0.91) = 285А, где U1ф - номинальное фазное напряжение, В;
Р2н - номинальная мощность, Вт;
h - КПД;
Номинальный вращающий момент Мном, определим по формуле:
Мном = 9570× Р2н/(nc×[1 - Sном]) = 9570×160/(1500×[1 - 0.014]) = 1035.3 Н×м, где nc - синхронная частота вращения, об/мин;
Sном - номинальное скольжение;
Сопротивления Х1 и R1 Т - образной схемы замещения АД (Рис2.2) найдем по следующим формулам:
Х10 = 2×Х1'×Хm/( Хm + Ö( Хm2 + 4× Х1'× Хm)) = 2×0.107×4.6/(4.6 + Ö(4.62 + 4×0.107×4.6))
Х10 = 0.1046о.е.
R10 = R1'× Х10/ Х1' = 0.018×0.1046/0.107 = 0.0176 о.е.
Параметры Г - образной схемы замещения (рис.2.1.) запишем в абсолютных единицах:
U1ф/ I1н = 220/285 = 0.772;
R1' = (U1ф/ I1н)× R1' = (220/285)×0.018 = 0.0139 Ом;
Х1' = (U1ф/ I1н)× Х1' = 0.772×0.107 = 0.0826Ом;
R2" = (U1ф/ I1н)× R2" = 0.772×0.017= 0.01312 Ом;
X2" = (U1ф/ I1н)× Х2" = 0.772×0.15 = 0.1158Ом;
Хм = (U1ф/ I1н)× Хm = 0.772×4.6= 3.5512Ом.
Параметры Т - образной схемы замещения АД (Рис 2.2.) запишем в абсолютных единицах:
Х1 = (U1ф/ I1н)×Х10 = 0.772×0.1046 = 0.0807 Ом;
L1 = Х1/(2p×fc), где fc - частота сети;
L1 = 0.0807/(2p×50) = 0.000257 Гн;
Хм0 = Хм - Х1' = 4.6 - 0.1046 = 4.4954 о.е.;
Рис. 2.1. Г-образная схема замещения.
Хм = (U1ф/ I1н)× Хм0 = 0.772×4.4954 = 3.47 Ом;
Lм = Хм/(2p×fc) = 3.47/(2p×50) = 0.011051 Гн;
Х2' = (U1ф/ I1н)× Х2"×(Х10/ Х1')2 = 0.772×0.15×(0.1046/0.107)2 = 0.1106 Ом;
L2' = Х2'/(2p×fc) = 0.1106/(2p×50) = 0.000352Гн;
R1 = (U1ф/ I1н)× R10 = 0.772×0.0176=0.01358Ом;
R2' = (U1ф/ I1н)× R2"×(Х10/ Х1')2 = 0.772×0.017×(0.1046/0.107)2 =0.0125Ом.
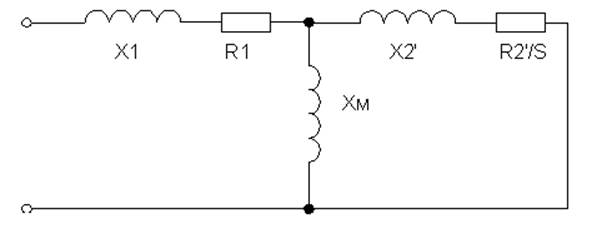
Рис.2.2 Т-образная схема замещения.
Основываясь на полученных данных определяем параметры динамических звеньев.
Tr = Lr/ Rr = 0.011403/ 0.0125 =0.912 с, где Tr – постоянная времени роторной цепи ;
Lr – полная индуктивность ротора ;
J = Jд + Jм = 3.1+122.6 =125.7 кг/м2 , где J - суммарный момент инерции ;
Jд – момент инерции ротора АД ;
Jм – момент инерции насоса, приведенный к валу электродвигателя.
Kв / Tвp+1 – безинерционное звено, которое рассчитываем
K = U1н / U1у = 76;
K2 = Хм / Х2’ =31.374
Кос – коэффициент обратной связи по скорости:
Кос = Uзс / wо = 0.016 В/c-1;
Kот – коэффициент обратной связи по току:
Kот = Uзт / Iзт =5 / 285 = 0.0175 В/А ;
T2 = L2’ / R2’ = 0.000352/0.0125 = 0.02816 c , где L2’ – индуктивное сопротивление ротора;
T1 = L1 / R1 = 0.000257/0.01358 c, где L1 = индуктивное сопротивление статора.
k = (Iогр-I1)·Kот/(wогр-w1) = (450-285)∙0.0175/(43.96-4.4)∙0.016 = 4.562;
b = (Iогр-I1)·Kот = (450-285)∙0.0175 = 2.88;
a = I1·Kот = 285∙0.0175 = 4.56;
где Iогр – ограничение тока якоря, по рис.
Синтез регуляторов. Общие положения.
Синтез регулятора тока.
Для того чтобы произвести данную операцию составляется структурная схема контура тока и по ней запишем передаточную функцию по управлению (далее ПФ) разомкнутого контура.
Рис.
По рис. составляем ПФ контура тока :
Принимаем частоту среза wср=100 c-1;
Tрт = 1/wср=1/100=0.01 c;
Коэффициент регулятора тока имеет вид :
Крт = 1/(1/R1)·1/K·1/Koт =1/73.637·1/76·1/0.0175=0.0102;
Регулятор тока имеет вид:
Wрт = Kрт·1/Tрт·(T1p+1);
Wрт = 0.0102·1/0.01p·(0.018925p+1)
Синтез регулятора скорости.
Рис.
Вначале рассмотрим внутренний контур
W’(p) = 3/2·(ψ2x2/R2’) ·pd·(1/Jp) / (3/2·(ψ2x2/R2’) ·pd·(1/Jp)+1) = 3/2·(3.1432/0.0125) ·2·(1/125.7p) / ( 3/2·(3.1432/0.0125) ·2·(1/125.7p)+1) = 1/(0.053p+1);
Малую постоянную времени Tм примем равной Tрт, тогда
w’ср=1/2Tм = 1/2·0.01 = 50 c-1;
Tрс = (1/ w’ср) ·Koc·Kf = 1/50·0.016·62.8 = 0.02 c;
Рассмотрев внутренний контур преобразуем структурную схему контура скорости.
Рис.
Исходя из рис получаем
Wc(p) = Wрс·Kf ·Koc·W’(p) = Wрс·62.8·0.016·(1/0.053p+1);
В результате регулятор скорости имеет вид:
Wрс = (0.053p+1) ·1/0.02p
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

