Приведенная ниже таблица содержит краткое описание функций главной платы.
Таблица 2
|
Компонент |
Описание |
|
|
Шестиимпульсный выпрямитель |
Преобразование трёхфазного напряжения переменного тока в напряжение постоянного тока |
|
|
Блок конденсаторов |
Стабилизация напряжения в промежуточной цепи постоянного тока |
|
|
Шестиимпульсный инвертор на биполярных транзисторах |
Преобразование напряжения постоянного тока в напряжение переменного тока и обратно. Управление двигателем осуществляется путём коммутации силовых транзисторов |
Печатные платы
Привод в стандартной комплектации содержит следующие печатные платы:
● главная печатная плата (AINT);
● плата управления двигателем и ввода/вывода (RMIO-02) с волоконно-оптической линией связи с платой AINT;
● плата управления входным мостом (AINP);
● плата защиты входного моста (AIBP) с варисторами, демпфирующими устройствами для тиристоров;
● плата питания (APOW);
● плата управления силовыми транзисторами (AGDR);
● плата диагностики и интерфейса панели управления (ADPI);
● платы фильтров электромагнитных помех (NRFC) с опцией +Е 202 в ячейках с блоком расширения;
● плата управления тормозным прерывателем (ABRC) для варианта +0150.
Управление двигателем
Управление двигателем осуществляется методом прямого управления крутящим моментом (DTC). Измеряются токи в двух фазах двигателя и напряжение в промежуточной цепи постоянного тока, и эти данные используются для регулирования. Ток третьей фазы измеряется для защиты от замыкания на землю.
Постоянные скорости
Привод позволяет задать 15 постоянных скоростей. Выбор постоянной скорости осуществляется с помощью цифровых входов. Режим постоянной скорости имеет приоритет над внешним заданием скорости. Эта функция работает с циклом 6 мс.
Настройка регулятора скорости
Регулятор скорости автоматически настраивается при выполнении идентификации двигателя. Однако в приводе предусмотрена возможность ручной настройки регулятора (коэффициент усилия, постоянные времени интегрирования и дифференцирования), а также выполнения дополнительной автоматической настройки регулятора. При автоматической настройке регулятора скорости учитывается величина механической нагрузки и момент инерции двигателя и подсоединённого к нему оборудования.
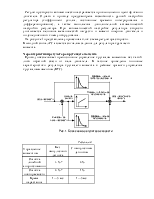
На рисунке 1 представлена упрощённая блок-схема регулятора скорости. Выходной сигнал РС является сигналом задания для регулятора крутящего момента.
Характеристики регулятора крутящего момента
Привод обеспечивает прецизионное управление крутящим моментом без какой-либо обратной связи от вала двигателя. В таблице приведены типичные характеристики регулятора крутящего момента в режиме прямого управления крутящим моментом (DTC).
Таблица 3
|
Управление моментом |
Без импульсного датчика |
С импульсным датчиком |
|
Ошибка линейной аппроксимации |
±4 %* |
±3 % |
|
Ошибка повторяемости |
±3 %* |
±1 % |
|
Время нарастания момента |
1…5 мс |
1…5мс |
* Ошибка может быть больше при работе вблизи нулевой частоты
Скалярное управление
Помимо режима прямого управления крутящим моментом (DTC) в приводе предусмотрен режим скалярного управления двигателем. В этом режиме используется сигнал задания частоты. Метод скалярного управления не обеспечивает таких же высоких характеристик, как стандартный метод прямого управления крутящим моментом.
Режим скалярного управления рекомендуется использовать в специальных приложениях, перечисленных ниже.
● Приводы с несколькими двигателями: 1) если нагрузка распределяется между двигателями неравномерно, 2) если используются двигатели различной мощности.
● Если номинальный ток двигателя составляет 1/6 от номинального тока привода.
● Если привод работает без подключённого двигателя (при тестировании).
● К приводу подключён двигатель высокого (более 690 В) напряжения
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.