МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
ГОМЕЛЬСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ им. П.О. СУХОГО
Кафедра: «Автоматизированный электропривод»
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту по теме:
«Автоматизация пуска, реверса и торможения двигателя постоянного тока»
Выполнил студент группы ЭП-31
Принял преподаватель
ГОМЕЛЬ 2003
СОДЕРЖАНИЕ
Введение……………………………………………………………..3
1. Построение нагрузочной диаграммы и определение режима работы электродвигателя …………………………………4
2. Предварительный выбор электродвигателя и проверка его по перегрузочной способности и по возможности пуска…………………………………………………………………5
3. Расчёт пусковых и тормозных сопротивлений графоаналитическим методом…………………………………….6
4. Составление релейно-контакторной схемы автоматизации пуска, реверса и торможение электродвигателя…………………9
4.1. Выбор силовой схемы………………………………………9
4.2. Выбор схемы управления…………………………………..10
5. Обоснование способа защиты электродвигателя, выбор и описание принципа действия аппаратов защиты………………..12
5.1. Защита от короткого замыкания и максимальная защита ………………………………………………………12
5.2. Защита двигателей от перегрузки током …………………17
5.3. Защита от самозапуска двигателей или нулевая защита…17
5.4. Электрическое блокирование………………………………17
6.1. Выбор и описание принципа действия электрических аппаратов схемы управления…………………………………….19
6.1. Контактор постоянного тока…………………………………19
6.2. Промежуточное реле……………..………………….……….20
6.3.Кнопки управления.…………………………………...………21
6.4. Реле тока……………………………………..………….…….22
6.5. Разработка схемы сигнализации ……………….…………...23
7. Описание работы релейно-контакторной схемы управления и защиты………………………………………………24
7.1. Подготовка к работе двигателя………………………………24
7.2. Пуск двигателя по часовой стрелке………………………….24
7.3.Пуск двигателя против часовой стрелки……………………..25
7.4. Торможение двигателя при вращении по часовой стрелке…………………………………………………………25
7.5 Торможение двигателя при вращении против часовой стрелки…………………………………………………………26
7.6. Реверс двигателя в направление вращения против часовой стрелки……………………………………………….26
7.7. Реверс двигателя в направление вращения по часовой стрелке…………………………………………………………26
8. Спецификация на оборудование…………………………………..28
Заключение………………………………………………………...29
Список литературы……………………………………………….30
ВВЕДЕНИЕ
Автоматизированным электроприводом называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение исполнительных органов рабочей машины и управления этим движением.
Нельзя представить себе ни одного современного производственного механизма, в любой области техники, который не приводился бы в действие автоматизированным электроприводом. В электроприводе основным элементом, непосредственно преобразующим электрическую энергию в механическую, является электрический двигатель, который чаще всего управляется при помощи соответствующих преобразовательных и управляющих устройств с целью формирования статических и динамических характеристик электропривода, отвечающих требованиям производственного механизма. Речь идет не только о сообщении машине вращательного или поступательного движения, но, главным образом, об обеспечении с помощью автоматизированного электропривода оптимального режима работы машин, при котором достигается наибольшая производительность при высокой точности.
В данном курсовом проекте нам предстоит разработать схему управления электродвигателем при помощи релейно-контакторных устройств. Эта схема должна быть способна выполнять следующие функции:
-- пуск двигателя в обоих направлениях;
-- реверс двигателя;
-- торможение двигателя.
При этом нужно обеспечить защиту схемы от аварийных режимов работы, а также сигнализацию основных режимов работы схемы.
1. Построение нагрузочной диаграммы и определение режима работы электродвигателя
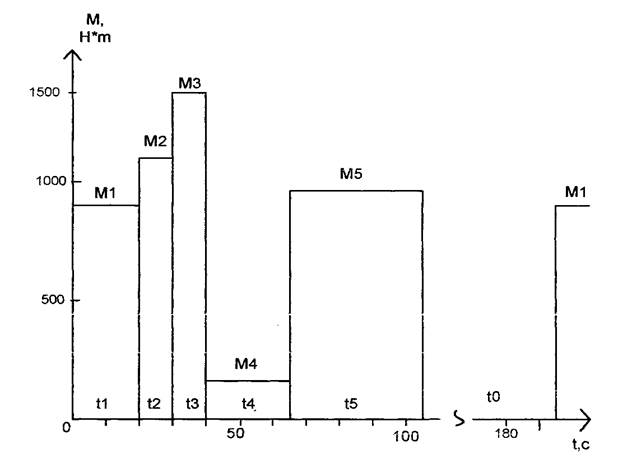
Режим работы электродвигателя определяем в зависимости от фактического значения продолжительности включения в процентном отношении:
 где
где
 -- время работы электродвигателя;
-- время работы электродвигателя;
t0 – время паузы.
Численно значение ПВф% находится в пределах 8—80% -- имеет место повторно-кратковременный режим работы(S3).
2. Предварительный выбор электродвигателя и проверка его по перегрузочной способности и по возможности пуска.
Выбор двигателя производится по методу эквивалентной мощности (момента). Если двигатель имеет жёсткую характеристику (n=const ), то мощность пропорциональна моменту.
![]()



Так как ПВф% отличается от ПВст% , то мощность ЭД необходимо выбирать по ближайшему стандартному значению, пересчитывая её по формуле:

Выбираем двигатель из условия:
![]()
Двигатель постоянного тока Д818.
|
Pн, кВт |
Iн, А |
nн, об/мин |
Мmax Н·м |
Rв, Ом |
Iвн, A |
Фн·10-2 Вб |
Rя, Ом |
Rдп, Ом |
Jя, кг·м2 |
nmax, об/мин |
|
58 |
292 |
475 |
7950 |
22.2 |
6.7 |
10.9 |
0.0039 |
0.0027 |
27.5 |
1500 |
Проверка выбора электродвигателя
1. 0.8·Mmax>M3
0.8·7950>1500
2. Пусковой момент М1 2.3·Mп>M1
Mн=1166.1 Н·м 2.3·1166.1>2332.2 – выполняется.
Выбор электродвигателя сделан верно.
3. Расчёт пусковых и тормозных сопротивлений графоаналитическим методом

Uн = 380 В

![]()
![]()
![]()
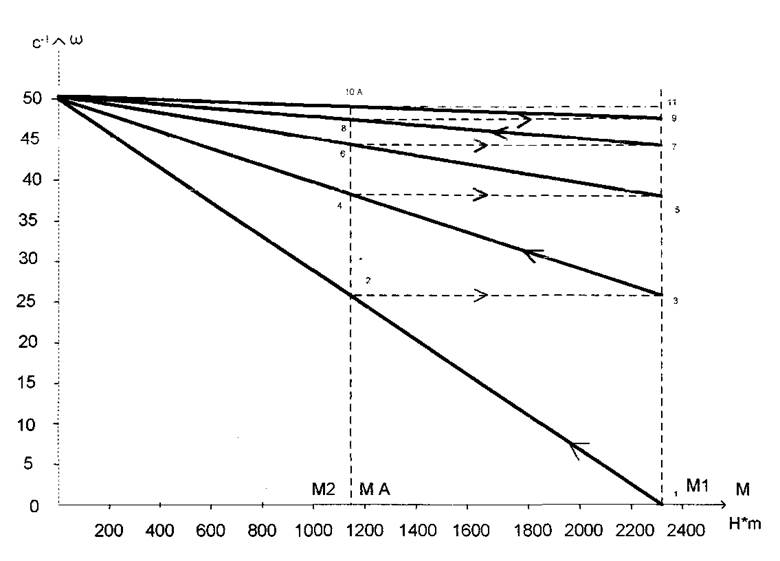
Рис. 3.1. Диаграмма разгона двигателя по ступеням.
Масштаб сопротивлений

Находим пусковые сопротивления
![]()
Выбираем сопротивление R1=13 Ом
![]()
Выбираем сопротивление R2=6.2 Ом
![]()
Выбираем сопротивление R3=3 Ом
![]()
Выбираем сопротивление R4=1.5 Ом

Выбираем сопротивление R5=24 Ом.
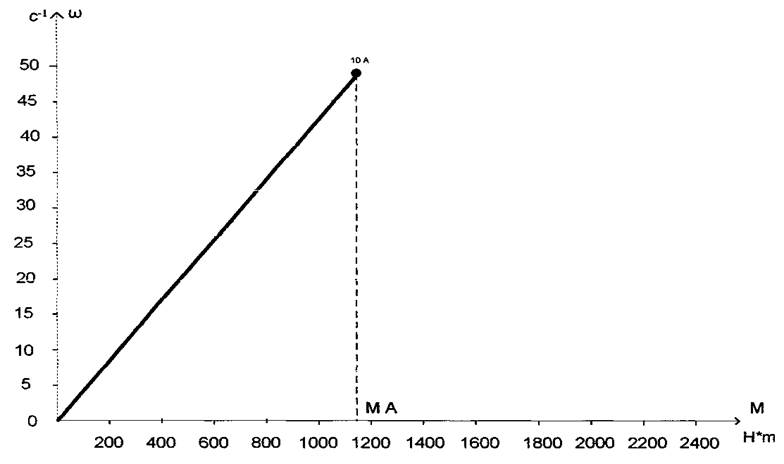
Рис. 3.2. Тормозная характеристика.
4. СОСТАВЛЕНИЕ РЕЛЕЙНО-КОНТАКТОРНОЙ СХЕМЫ АВТОМАТИЗАЦИИ ПУСКА, РЕВЕРСА И ТОРМОЖЕНИЕ ЭЛЕКТРОДВИГАТЕЛЯ.
4.1. Выбор силовой схемы.
Так как двигатель у нас питается постоянным напряжением 220В, то необходимо обеспечить подвод к двигателю постоянного напряжения 220В. Нужно предусмотреть центральное включение (отключения) всей схемы от источника питания. Эту роль выполняет автоматический выключатель, который является также защитой схемы от токов превышающих допустимые. После автоматического выключателя подаём напряжение на двигатель через две группы контактов, которые осуществляют подключение электродвигателя к напряжению одной полярности и к напряжению обратной полярности.
Для разгона двигателя по четырём ступеням в цепь якоря вводят сопротивления R1, R2, R3 и R4. В первоначальный момент, когда скорость двигателя была равной нулю, двигатель начинает разгон при четырёх подключённых сопротивлениях. Как только скорость двигателя дойдёт до скорости, когда можно включать вторую ступень, контактами необходимо шунтировать сопротивление R1. После чего двигатель разгоняется, используя три сопротивление в цепи якоря. И так пока двигатель не разгонится. Как только двигатель достаточно разгонится, нужно произвести шунтирование всех сопротивлений. Тем самым, двигатель выходит на естественную характеристику работы.
Для динамического торможения нужно дополнительное тормозное сопротивление Rт в цепи якоря.
Необходимо предусмотреть защиту от обрыва поля обмотки возбуждения. Так как при подключенной обмотки якоря к напряжению, без потока
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.