Корпус МК51 имеет два вывода для подключения кварцевого резонатора, четыре вывода для сигналов, управляющих режимом работы МК и восемь линий порта Р3, которые могут быть запрограммированы пользователем на выполнение специализированных функций обмена информацией со средой.
Основу структурной схемы МК51 образует внутренняя двунаправленная 8-битная шина, которая связывает между собой все основные узлы и устройства: резидентную память, АЛУ, блок регистров специальных функций, устройство управления и порты ввода/вывода.
Все четыре порта МК51 предназначены для ввода или вывода информации побайтно. Каждый порт содержит управляемые регистр-защелку, входной буфер и выходной драйвер.
Все драйверы портов 0 и 2, а также входной буфер порта 0 используются при обращении к внешней памяти.
Все выводы порта 3 могут быть использованы для реализации альтернативных функций:
- RD – чтение. Активный сигнал низкого уровня формируется аппаратно при обращении к ВПД;
- WR – запись. Активный сигнал низкого уровня формируется аппаратно при обращении к ВПД;
- T1 – вход таймера/счетчика 1 или тест-вход;
- T1 – вход таймера/счетчика 1 или тест-вход;
- INT1 – вход запроса прерывания 1. Воспринимается сигнал низкого уровня или срез;
- INT1 – вход запроса прерывания 0. Воспринимается сигнал низкого уровня или срез;
- TXD – вход передатчика последовательного порта в режиме УАПП. Выход синхронизации в режиме сдвигающего регистра;
- RXD – вход приемника последовательного порта в режиме УАПП. Ввод/вывод данных в режиме сдвигающего регистра.
Порт 0 является двунаправленным, а порты 1,2 и 3 – квазидвунапрвленными. Все могут быть использованы для организации ввода/вывода информации по двунаправленным линиям передачи. Однако 0 и 2 не могут быть использованы для этой цели, в случае если МК – система имеет внешнюю память, связь с которой организуется через общую разделяемую шину адреса/данных, работающую в режиме временного мультиплексирования.
Память программ и память дынных, размещенные на кристалле МК, физически и логически разделены, имеют различные механизмы адресации, работают под управлением различных сигналов и выполняют различные функции.
Память программ (ПЗУ) имеет емкость 4Кбайта и предназначена для хранения команд, констант, управляющих слов инициализации, таблиц перекодировки входных и выходных переменных и т.п. РПП имеет 16-битную шину адреса, через которую обеспечивается доступ из из счетчика команд или из регистра-указателя данных. Последний выполняет функции базового регистра при косвенных переходах по программе или используется в командах, оперирующих с таблицами.
Память данных (ОЗУ) предназначена для хранения переменных в процессе выполнения прикладной программы, адресуется одним байтом и имеет емкость 128 байт. Кроме того, к адресному пространству РПД примыкают адреса регистров специальных функций.
Кварцевый резонатор, подключаемый к внешним выводом Х1 и Х2, управляет работой внутреннего генератора, который формирует сигналы синхронизации.
На вход EA подается активный сигнал, чтобы получить доступ к внешней памяти программ.
На вход INT0 подается сигнал низкого уровня тогда, когда МК работает с подключенными значениями. При замыкании контакта МК51 начнет работать с новыми данными.
Порт Р2 используется длауправления работой всей схемы. Так линии Р2.0 и Р2.1 позволяют выбирать тот датчик, с которого необходимо снять значение. Линия Р2.4, Р2.5, Р2.6. управляют отображением информации на линейном дисплее.
Порт Р0 используется для входа данных, а порт Р1- для их вывода на индикаторы.
3.2 Расчет датчиков количества оборотов диска.
3.2.1 Составляем схему датчика.
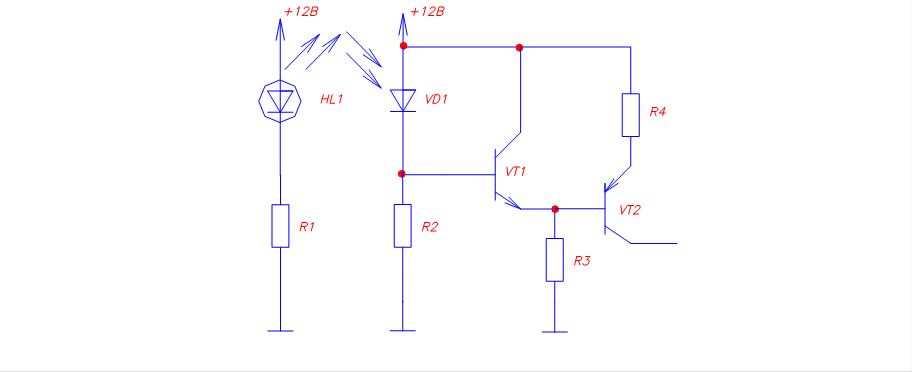
3.2.2Расчет схемы.
Iпр.max=20мА
R1=(Uпит-Uпр.)/Iпр.=(12-2.8)/10·10-3=910Ом
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.