Регулирование в реальном времени
Цель работы: настроить систему регулирования при работе в условиях возмущений.
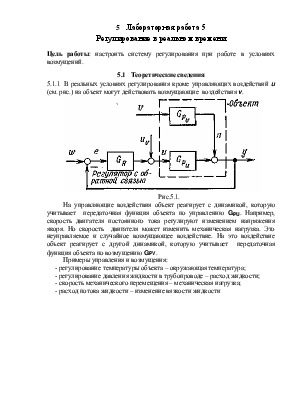
Рис.5.1.
На управляющие воздействия объект реагирует с динамикой, которую учитывает передаточная функция объекта по управлению GPU. Например, скорость двигателя постоянного тока регулируют изменением напряжения якоря. Но скорость двигателя может изменить механическая нагрузка. Это неуправляемое и случайное возмущающее воздействие. На этовоздействие объект реагирует с другой динамикой, которую учитывает передаточная функция объекта по возмущению GPV.
Примеры управления и возмущения:
- регулирование температуры объекта – окружающая температура;
- регулирование давления жидкости в трубопроводе – расход жидкости;
- скорость механического перемещения – механическая нагрузка;
- расход потока жидкости – изменение вязкости жидкости
5.2.1. Изучите теоретические сведения. Запустите программу моделирования. Выберите заданный объект регулирования и установите его параметры по управлению и по возмущению. Запомните графики и tрег переходных характеристик по управлению и по возмущению. Запишите передаточные функции объекта по управлению GPU(s) и по возмущению GPV(s).
Варианты заданий.
|
Вариант объекта по управлению |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
№ объекта |
2 |
3 |
4 |
5 |
1 |
5 |
2 |
4 |
3 |
1 |
|
Вариант парам |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Постоянная Т1 |
24 |
20 |
15 |
22 |
15 |
10 |
20 |
12 |
16 |
18 |
|
Постоянная Т2 |
8 |
6 |
5 |
10 |
6 |
6 |
8 |
5 |
9 |
6 |
|
Пост. Т3 (числ.) |
4 |
3 |
2 |
4 |
3 |
2 |
4 |
2 |
3 |
3 |
|
Коэф. затухания e |
0,5 |
0,3 |
0,4 |
0,2 |
0,4 |
0,2 |
0,3 |
0,5 |
0,4 |
0,3 |
|
Вариант объекта по возмущению |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
№ объекта |
1 |
2 |
3 |
4 |
5 |
1 |
5 |
2 |
4 |
3 |
|
Вариант парам |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Коэфф. усиления |
0,3 |
24 |
20 |
15 |
22 |
15 |
10 |
20 |
12 |
16 |
|
Постоянная Т1 |
18 |
8 |
6 |
5 |
10 |
6 |
6 |
8 |
5 |
9 |
|
Постоянная Т2 |
6 |
4 |
3 |
2 |
4 |
3 |
2 |
4 |
2 |
3 |
|
Пост. Т3 (числ.) |
3 |
0,5 |
0,3 |
0,4 |
0,2 |
0,4 |
0,2 |
0,3 |
0,5 |
0,4 |
|
Коэф. затухания e |
0,3 |
24 |
20 |
15 |
22 |
15 |
10 |
20 |
12 |
16 |
5.2.2. По переходной характеристике объекта по правлению выберите такт квантования системы. В режиме слежения настройте ПИД- регулирование на хорошую отработку задания. Отобразите таблицами и графиками реакцию системы на скачек задания (режим слежения) и на скачек возмущения (режим стабилизации).
В режиме «Управление в реальном времени», задавая вручную единичный скачек задания и ~0.6-0.8 скачек возмущения, сравните реакцию системы на эти воздействия. При такой настройке скачек возмущения отрабатывается хуже, чем скачек задания
Рис.5.2. Настройка слежения
5.2.3. В режиме стабилизации, изменяя настройки ПИД-регулятора, настройте улучшенную реакцию системы на скачек возмущения. Отобразите таблицами и графиками реакцию системы на скачек возмущения, а также на скачек задания.
В режиме «Управление в реальном времени», задавая вручную единичный скачек задания и ~0.6-0.8 скачек возмущения, сравните реакцию системы на эти воздействия. При такой настройке скачек задания отрабатывается хуже, чем скачек возмущения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.