Начало системы осей, в которой определяются координаты центра масс и центра давления, удобнее всего связать с машиной и расположить в центре ее опорной поверхности. В этом случае качество компоновки машины, т.е. рациональность пространственного расположения ее составных частей, оценивается мерой близости центра давления к началу системы координат.
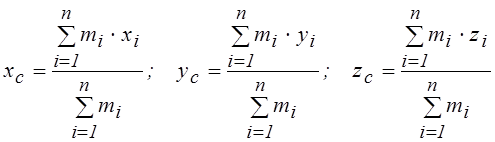
Из механики известно, что координаты центра масс механической системы вычисляются по формулам:
 ,
(1.1)
,
(1.1)
где ![]() -
масса составной части машины;
-
масса составной части машины;
![]() -
координаты ее центра масс.
-
координаты ее центра масс.
При выполнении
задания координаты ![]() задаются,
а при проектировании машины они определяются по ее эскизному чертежу. Для
удобства вычислений по формулам (1.1) рекомендуется составить таблицу 1.1.
задаются,
а при проектировании машины они определяются по ее эскизному чертежу. Для
удобства вычислений по формулам (1.1) рекомендуется составить таблицу 1.1.
Таблица 1.1
Данные для вычисления координат центра масс
|
№ п/п |
Наименование составной части машины |
Обозначение |
Масса, кг |
Координаты центра масс, м |
||
|
|
|
|
||||
|
1 |
Гусеничный ход |
|
2500 |
0 |
0,2 |
0,5 |
|
... |
... |
... |
... |
... |
... |
... |
|
|
||||||
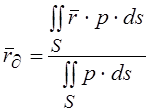
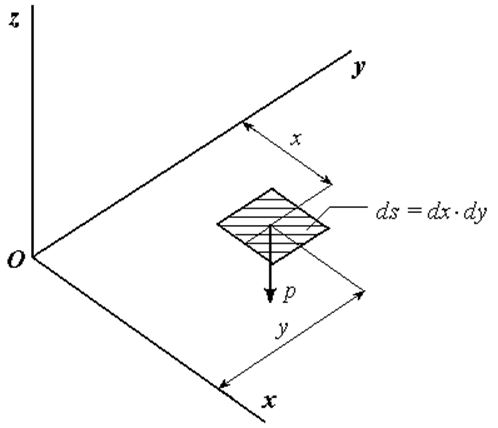
Центром давления машины на грунт называется точка, радиус-вектор которой определяется выражением
 ,
(1.2)
,
(1.2)
где ![]() -
давление машины на грунт в точке с радиус-вектором
-
давление машины на грунт в точке с радиус-вектором ![]() ;
;
![]() -
площадь опорной поверхности машины;
-
площадь опорной поверхности машины;
![]() -
элемент этой площади.
-
элемент этой площади.
Иначе, центр давления представляет собой точку приложения равнодействующей сил давления машины на несущее основание. Из последнего определения следует, что эта точка лежит в опорной плоскости гусеничного хода.
Записав (1.2) в проекциях на оси системы координат, получим:
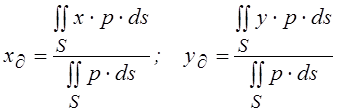 .
(1.3)
.
(1.3)
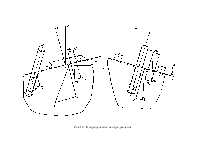
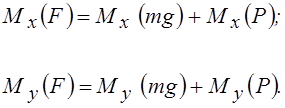
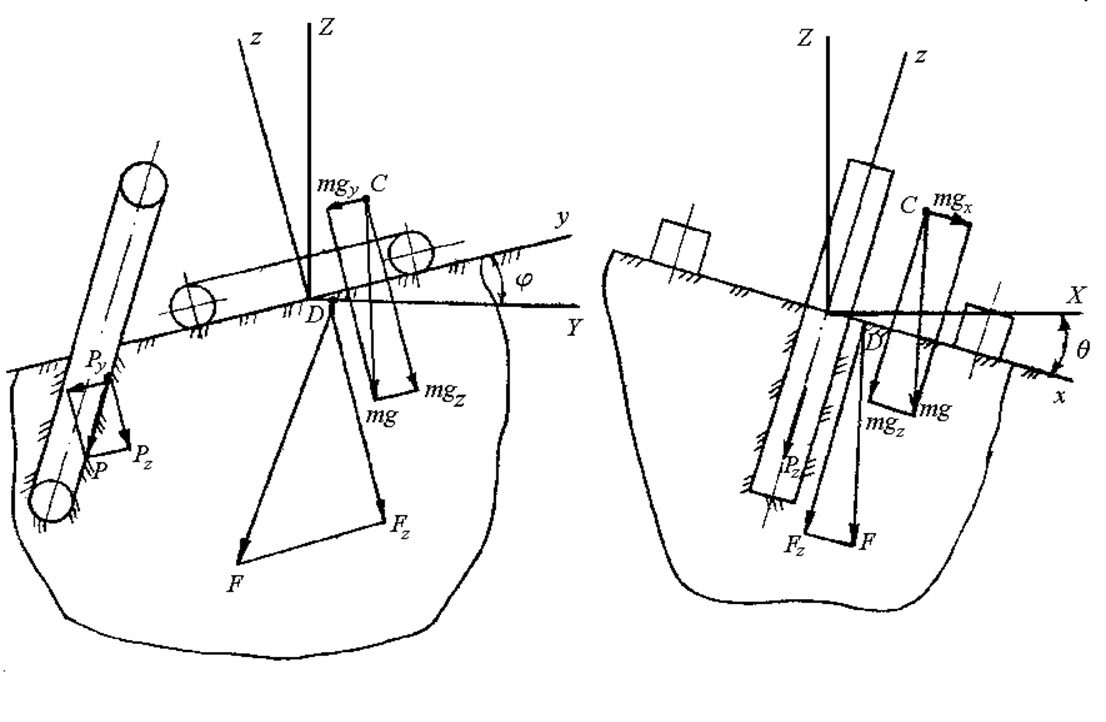
Интегралы в
числителе выражений (1.3) представляют собой (рис. 1.1) суммарные моменты сил
давления машины на грунт относительно осей ![]() и
и
![]() ,
т.е.
,
т.е.
 |
 .
.
Рис.
1.1. К определению моментов ![]() и
и
![]()
На основании теоремы Вариньона о равенстве момента равнодействующей сумме моментов составляющих можно записать
 , где
, где ![]() -
равнодействующая внешних сил, действующих на машину
-
равнодействующая внешних сил, действующих на машину
(исключая силы реакций грунта на ходовое устройство).
Для горных машин
равнодействующая ![]() внешних
сил представляет геометрическую сумму силы тяжести, приложенной в центре масс,
сил реакций разрабатываемой породы на рабочие органы, крюкового усилия и т.п.
внешних
сил представляет геометрическую сумму силы тяжести, приложенной в центре масс,
сил реакций разрабатываемой породы на рабочие органы, крюкового усилия и т.п.
Тогда на основании той же теоремы Вариньона (в нашем случае рис. 1.2)
 (1.4)
(1.4)
где ![]() -
сила тяжести;
-
сила тяжести;
![]() -
равнодействующая внешних сил.
-
равнодействующая внешних сил.
Интеграл, стоящий в знаменателе выражений (1.3), есть общая сила давления машины на несущее основание
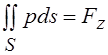 , где
, где ![]() -
проекция равнодействующей
-
проекция равнодействующей ![]() на
ось
на
ось ![]() ,
которая направлена нормально к опорной поверхности,
,
которая направлена нормально к опорной поверхности,
![]() ,
(1.5)
,
(1.5)
где ![]() и
и
![]() -
соответственно проекции силы тяжести и равнодействующей внешних сил на ту же ось.
-
соответственно проекции силы тяжести и равнодействующей внешних сил на ту же ось.
С учетом этого, окончательно
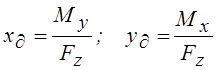 ,
(1.6)
,
(1.6)
где ![]() и
и
![]() определяются
выражениями (1.4), а
определяются
выражениями (1.4), а ![]() -
выражением (1.5).
-
выражением (1.5).
 |
Направление
действия силы ![]() зависит
от способа соединения рабочего органа с машиной. Если рабочий орган закреплен
на машине жестко, то направление силы
зависит
от способа соединения рабочего органа с машиной. Если рабочий орган закреплен
на машине жестко, то направление силы ![]() меняется
вместе с изменением положения машины, вызываемым неровностью рельефа
поверхности или различной деформацией грунта под гусеницами. В этом случае
направление силы
меняется
вместе с изменением положения машины, вызываемым неровностью рельефа
поверхности или различной деформацией грунта под гусеницами. В этом случае
направление силы ![]() зафиксировано
в системе осей
зафиксировано
в системе осей ![]() ,
связанной с машиной. В ряде машин, предназначенных для рытья осушителей или
профилирования поверхности, с целью создания постоянного наклона дна осушителей
и требуемого профиля поверхности рабочие органы независимо от положения самой
машины сохраняют заданное положение относительно неподвижной (инерциальной) системы
осей
,
связанной с машиной. В ряде машин, предназначенных для рытья осушителей или
профилирования поверхности, с целью создания постоянного наклона дна осушителей
и требуемого профиля поверхности рабочие органы независимо от положения самой
машины сохраняют заданное положение относительно неподвижной (инерциальной) системы
осей ![]() .
.
Таким образом,
направление силы ![]() у
этих машин всегда ориентировано относительно осей
у
этих машин всегда ориентировано относительно осей ![]() .
Напомним, что направление силы
.
Напомним, что направление силы ![]() совпадает
с осью
совпадает
с осью ![]() .
.
Для вычисления ![]() ,
,
![]() и
и
![]() по
формулам (1.4), (1.5) достаточно разложить силы
по
формулам (1.4), (1.5) достаточно разложить силы ![]() и
и
![]() на
проекции по осям
на
проекции по осям ![]() ,
,
![]() и
и
![]() .
Чтобы это сделать, необходимо знать углы между направлением действия сил и названными
осями. В нашем случае часть сил (сила
.
Чтобы это сделать, необходимо знать углы между направлением действия сил и названными
осями. В нашем случае часть сил (сила ![]() )
легко проектируется на оси системы
)
легко проектируется на оси системы ![]() ,
а другая часть (сила
,
а другая часть (сила ![]() )
может быть ориентирована как в системе
)
может быть ориентирована как в системе ![]() ,
так и в системе
,
так и в системе ![]() .
.
Чтобы найти проекции сил в одной системе координат по известным проекциям в другой необходимо знать углы или таблицу направляющих косинусов между осями систем.
Направляющие
косинусы определяют посредством углов Эйлера ![]() ,
,
![]() ,
,
![]() (рис.
1.3), которые задают ориентацию подвижного триэдра
(рис.
1.3), которые задают ориентацию подвижного триэдра ![]() относительно
неподвижного
относительно
неподвижного ![]() .
Перевод триэдра
.
Перевод триэдра ![]() в
положение
в
положение ![]() осуществляется
тремя последовательными поворотами: на угол
осуществляется
тремя последовательными поворотами: на угол ![]() вокруг
оси
вокруг
оси ![]() ,
на угол
,
на угол ![]() вокруг
оси
вокруг
оси ![]() ,
с которой совпадает ось
,
с которой совпадает ось ![]() после
первого поворота, и на угол
после
первого поворота, и на угол ![]() вокруг
оси
вокруг
оси ![]() ,
с которой совпадает ось
,
с которой совпадает ось ![]() после
двух предыдущих поворотов. Заметим, что после первого поворота ось
после
двух предыдущих поворотов. Заметим, что после первого поворота ось ![]() займет
положение
займет
положение ![]() ,
ось
,
ось ![]() после
второго поворота совпадает с
после
второго поворота совпадает с ![]() и
после третьего с
и
после третьего с ![]() ,
ось
,
ось ![]() переходит
в промежуточное положение
переходит
в промежуточное положение ![]() после
первого поворота и в положение
после
первого поворота и в положение ![]() после
третьего. Углы
после
третьего. Углы ![]() ,
,
![]() ,
,
![]() называются
соответственно углами рысканья, поперечного и продольного крена.
называются
соответственно углами рысканья, поперечного и продольного крена.
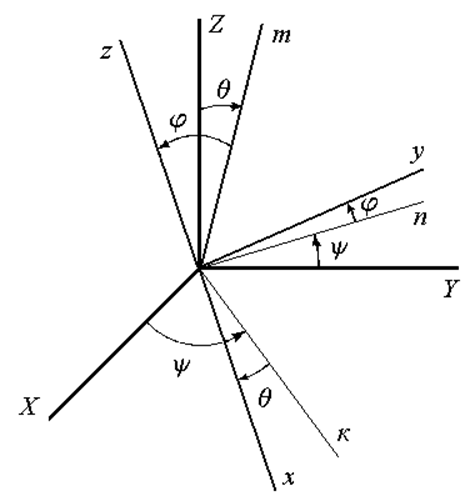 |
Рис. 1. 3. Ориентация подвижных осей
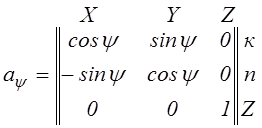
Таблицу косинусов
между подвижными и неподвижными осями вычислим как произведение трех матриц
направляющих косинусов, образующихся после каждого из перечисленных поворотов.
Обозначив эти матрицы, соответственно через ![]() ,
,
![]() и
и
![]() ,
имеем
,
имеем
 .
.
Элементы этой
матрицы (рис. 1.3) равны косинусам углов между соответствующими осями
(например, ![]() ).
).
Аналогично
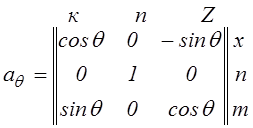 ;
;
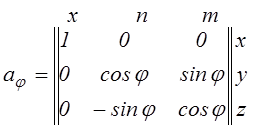 .
.
Тогда матрица направляющих косинусов определится как произведение трех приведенных матриц [1]
![]() .
.
Произведя умножение, найдем
 (1.7)
(1.7)
При статическом
расчете машина рассматривается в состоянии покоя, поэтому ![]() ,
,
![]() ,
,
![]() .
Приняв для упрощения
.
Приняв для упрощения ![]() ,
приходим к следующему виду таблицы направляющих
,
приходим к следующему виду таблицы направляющих
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.