сила сопротивления движения опорных катков гусеничного хода по гусеничным цепям,
![]()
![]() - сила сопротивления
движению прицепной машины,
- сила сопротивления
движению прицепной машины,
![]()
![]() - сила сопротивления
движения от составляющей силы тяжести при движении машины в гору,
- сила сопротивления
движения от составляющей силы тяжести при движении машины в гору,
![]()
![]() - сила сопротивления
движению, обусловленная силами инерции при разгоне (трогании с места) агрегата,
- сила сопротивления
движению, обусловленная силами инерции при разгоне (трогании с места) агрегата,

Тогда

2.1.1.15.Мощность на передвижение по прямой

2.1.1.16.Проверка запаса сцепления гусениц с грунтом

2*0,4*141666*4,6*0,42=218959Н;
2*0.8*141666*4.6*0.42+10.3+55800*9.81*sin![]() +1.15*55800*
+1.15*55800*![]() =92580H;
=92580H;
218959>92580
Запас сцепления достаточный.
Тяговый расчёт гусеничной машины на повороте
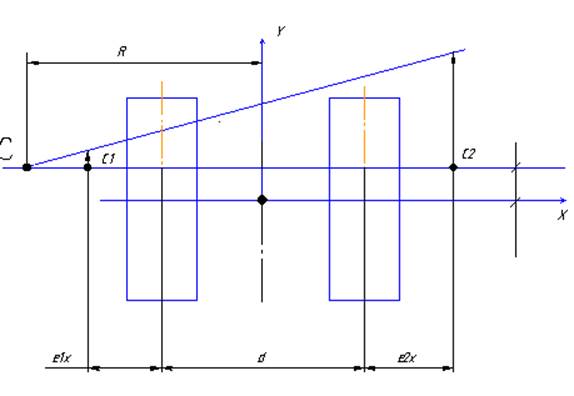
Рис.2.1.3 Положение центров вращения опорных ветвей гусениц и кинематика поворота.
2.1.1.17.Cреднее давление на грунт отстающей гусеницы
 Па;
Па;
 Па.
Па.
2.1.1.18. Проверка среднего давления машины на грунт
 кПа.
кПа.
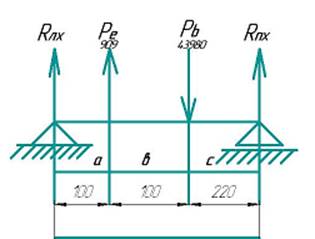
3. Составляющие главного вектора внешних сил
![]() Н;
Н;
 Н.
Н.
2.1.1.19.Главный момент внешних сил

2.1.1.20. Смещения e1x, e2x , ey координат центров вращения опорных площадок гусениц:

 м;
м;

 м.
м.
 м.
м.
2.1.1.21.Продольные составляющие T1y,T2y сил трения действующих на гусеницы:
 Н;
Н;
 Н.
Н.
2.1.1.22.Арифметические суммы боковых сил T1a,T2a ,действующих на гусеницы:
 Н;
Н;
 Н.
Н.
2.1.1.23.Тяговые усилия T1т,T2т гусеничных цепей:
 Н;
Н;
 Н.
Н.
где k’ – коэффициент сопротивления движению опорных катков по гусеничным цепям за счёт действия боковых сил.
2.1.1.24.Радиус и угловая скорость поворота:
 м;
м;
 с-1.
с-1.
2.1.1.25.Тормозное усилие, которое необходимо приложить к отстающей гусеничной цепи:
![]() Н.
Н.
2.1.1.26. Мощность на поворот
 кВт.
кВт.
2.1.1.27.Коэффициент запаса сцепления забегающей гусеницы:
 .
.
Сцепления вполне достаточно для поворота и движения.
2.2 Расчет кинематических параметров и элементов гидросистемы
Кинематическая схема привода буров роторного исполнительного органа со спаренным планетарным редуктором на первой ступени комбайна ПКС-8М
Кинематический расчёт редуктора привода приводной звёздочки гусеничного
хода.
Транспортный режим
2.2.1 ;
;
![]() =1500
об/мин-двигателя;
=1500
об/мин-двигателя;
 ;
; -звездочки;
-звездочки;
 об/c=114
об/мин;
об/c=114
об/мин;
 .
.
Рабочий режим
 ;
;
 об/c=90
об/мин;
об/c=90
об/мин;
2.2.2 .
.
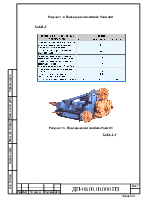
Кинематический расчёт наружного и внутреннего буров
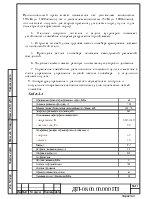
Кинематическая схема привода буров роторного исполнительного органа со спаренным планетарным редуктором на первой ступени разработанного комбайна .
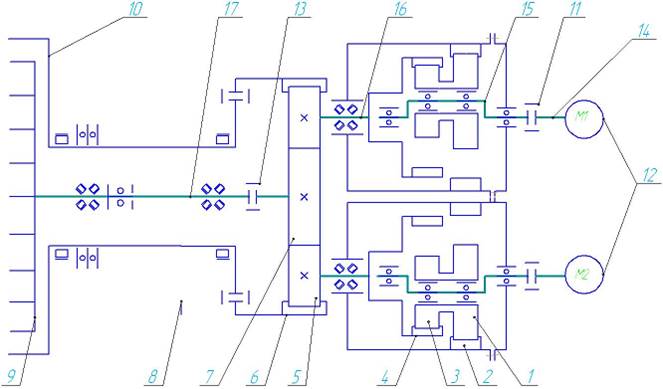
рис.2.2.1
|
Позиция |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Число зубьев |
33 |
43 |
30 |
40 |
15 |
68 |
36 |
|
Модуль,мм |
16 |
16 |
16 |
16 |
18 |
18 |
18 |
Передаточное отношение редуктора первой ступени Uред.1……. 48,29
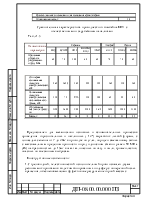
Таблица выбора параметров зубчатых колес под требуемое передаточное отношение
Таблица 2.2.2
|
Эксцентриситет |
Z1 |
Z2 |
Z3 |
Z4 |
U |
|
5m=80 |
33 |
43 |
30 |
40 |
44 |
Передаточное отношение редуктора первой ступени
2.2.3
2.2.4 ;
;
![]() Находим полное
передаточное отношение наружного и внутреннего буров
Находим полное
передаточное отношение наружного и внутреннего буров
2.2.5![]() ;
;
2.2.6![]() .
.
Находим частоту вращения наружного и внутреннего буров
2.2.7
2.2.8 об/мин.
об/мин.
Где:
1500- частоту вращения Эл.двигателя (об/мин).
3Кинематический расчёт бермовых фрез и отрезных коронок
2.2.9
где:
![]() - частота вращения бермовых фрез
- частота вращения бермовых фрез
2.2.10
где:
![]() - частота вращения отрезных коронок
- частота вращения отрезных коронок
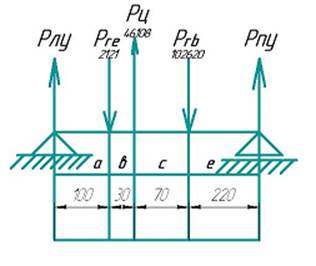
Расчёт цилиндра подъёма рабочего органа
Рассмотрим цилиндр в рабочем положении рис.2.2.2
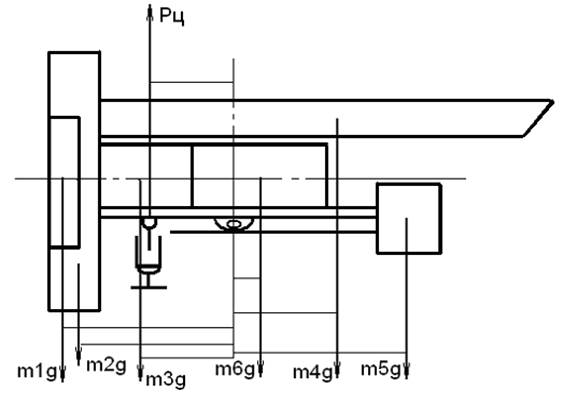
Рисунок 2.2.2
Требуемое усилие на штоке гидроцилиндра
2.2.11![]() Н,
Н,
![]()
 кг;
кг;
где ![]() - сила тяжести
- сила тяжести
l – плечо действия силы тяжести ;
h – плечо действия силы Ргц![]() .
.
2.2.12 кг;
кг;
Рабочая площадь поршня
2.2.13 м2, где P1
– давление рабочей жидкости;
м2, где P1
– давление рабочей жидкости;
Внутренний диаметр цилиндра при подаче рабочей жидкости в поршневую полость
2.2.14 м =50мм.
м =50мм.
Диаметр штока гидроцилиндра
2.2.15![]() м =15мм.
м =15мм.
Принимаем ![]() ход поршня
ход поршня ![]()
2.3Прочностной расчет основных элементов
Проводим расчет вала
Находим крутящий момент на валу электродвигателя
2.3.1
Где:
N-мощность Эл. двигателя
![]() -частота вращения вала
Эл. двигателя
-частота вращения вала
Эл. двигателя
Усилие в зацеплении f-g
2.3.2
Где:
Df,Dg-диаметр зубчатого колеса
U-передаточное отношение
2.3.3
Находим центробежную силу
2.3.4![]()
![]()
Где:
Vg-объем блока сателлитов
![]() -плотность металла а-межосевое расстояние
-плотность металла а-межосевое расстояние
2.3.5![]()
2.3.6![]()
2.3.7![]()
2.3.8![]()
Схема сателлита и усилия в зацеплениях с центральными колесами рис.2.3.1
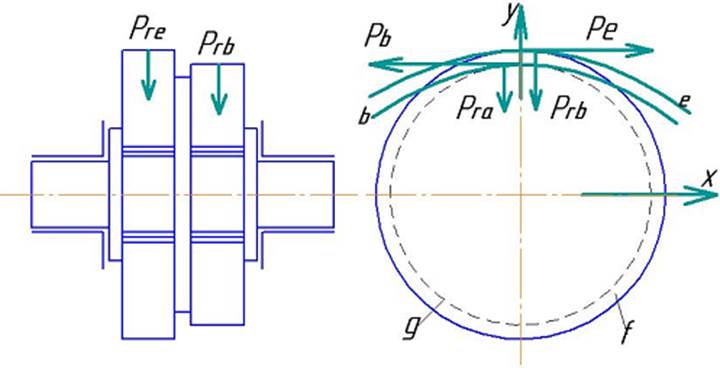
Рис.2.3.1
Реакции на опоры сателлитов в вертикальной плоскости рис.2.3.2
2.3.9
2.3.10
Реакции на опоры сателлитов в горизонтальной плоскости рис.2.3.3
2.3.11
2.3.12
Находим реакции в опорах подшипников водила
2.3.13![]()
2.3.14![]()
Исходя из усилий R1 и R2 подбираем роликоподшипники радиальные сферические двухрядные (по ГОСТ 5721-57 и 8545-57)
Таблица 2.3.1 Средняя серия
|
Условное обозначение подшипника |
Размер в мм |
С в тыс. |
Qст в тыс.кг |
nпр В тыс. Об/мин |
|||||||
|
3608 |
d |
D |
B |
d1 |
L |
r |
330 |
21.5 |
3.2 |
||
|
70 |
150 |
51 |
- |
- |
3.5 |
||||||
2.3.1 Расчет на контактную прочность ведется по примеру двух цилиндрических колес находящихся в зацеплении.(ПриложениеД)
Требуется рассчитать передачу по следующим данным
Ведущего колеса Ведомого колеса
Число зубьев 30 40
Модуль 14 14
Ширина зубчатого венца мм 80 75
Передаваемая мощность 110 кВт
Расчет, указанный в приложении велся по исходным данным в стандартной программе пакета «Компас 3D V8»
При его проведении был подобран материал зубчатых колес (сталь 45X) .
2.3.2 Оценка энергоемкости комбайна
Буроскалывающий исполнительный орган осуществляет комбинированное разрушение резцами и скалывание породы. Его резцы прорезают концентрические щели, что приводит к образованию концентрических целиков, которые потом скалываются резцедержателями. При такой схеме работы разрушается 60% всей горной массы с минимальными удельными затратами энергии (Ру=0,4-1,2кВт*ч/м3), остальные 40% измельчаются резцами в глубоких щелях с большой энергоемкостью (Ру=1.7-3.2кВт*ч/м3) при работе по калийной руде. Комбайн устойчиво работает при скорости подачи W=8-9 м/ч, Wmax=12 м/ч.
Средние удельные энергозатраты процесса разрушения калийной соли и выгрузки ее из забоя только по буроскалывающему элементу исполнительного органа при скорости подачи W=2-8 м/ч составляет 1.3-2кВт*ч/м3. При работе бермовых фрез и отрезного устройства Ру=3.6-4.7кВт*ч/м3
2.3.2.1Производительность комбайна по ходу и по исполнительному органу
Производительность по ходу
![]()
![]()
![]()
Wmax=12 м/ч
Qх=0.0297 м3/с=106.8м3/ч=213.6т/ч
Qх.б.=Fб*Wmax=96.5м3/ч
Теритическая производительность по рабочему органу > производительности по ходу, а во время работы Qх=Qб
Где:
F-площадь поперечного сечения снимаемого слоя
W-действительная скорость передвижения машины(скорость подачи
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.