Произведение напряжения сети на ток главной цепи двигателя
2.
Произведение частоты вращения на магнитный поток двигателя
3.
Произведение электромагнитного момента на частоту вращения двигателя
4.
Произведение электромагнитного момента на ток главной цепи двигателя
5.
Произведение напряжения сети на частоту вращения двигателя
5.
Номинальная мощность двигателя определяется следующим выражением:
1.
![]()
2.
![]()
3.
![]()
4.
5.
![]()
6.
Электроприводом малой мощности называются те, мощность двигателя которых находится в пределах:
1.
От 100 Вт до 1 кВт
2.
От 500 Вт до 2 кВт
3.
От 1 кВт до 5 кВт
4.
От 1 кВт до 10 кВт
5.
От 5 кВт до 10 кВт
7.
Основное уравнение движения электропривода имеет вид:
1.
2.
3.
4.
![]()
5.
8.
Если между электромагнитным моментом электродвигателя и моментом статического сопротивления имеет место соотношение
Мэд > Мс, то электродвигатель:
1.
2.
тормозиться
3.
вращается с постоянного частотой вращения
4.
неподвижен
5.
втягивается в синхронизм
9.
Динамический момент электропривода определяется выражением:![]()
1.
2.
3.
4.
5.
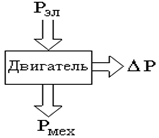
10.
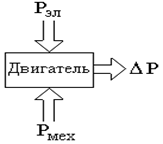
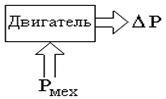
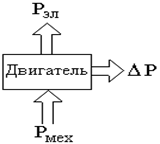
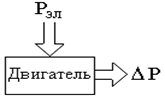
На энергетических диаграммах режиму рекуперативного торможения электропривода соответствует вариант:
1.
2.
3.
4.
5.
11.
Активный момент сопротивления на валу двигателя в электроприводе характеризуется тем, что:
1.
Момент сопротивления линейно зависит от частоты вращения двигателя
2.
Момент сопротивления не зависит от величины скорости, но зависит от направления вращения
3.
Момент сопротивления является квадратичной функцией частоты вращения
4.
Момент сопротивления не зависит ни от величины скорости, ни от направления вращения двигателя
5.
Момент сопротивления носит случайный характер
12.
На рисунке показана схема электродвигателя постоянного тока:
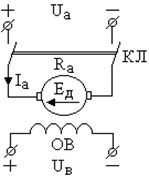
1.
2.
последовательного возбуждения
3.
независимого возбуждения
4.
смешанного возбуждения
5.
с возбуждением от постоянных магнитов
13.
Уравнение скоростной характеристики электродвигателя постоянного тока имеет вид
1
2
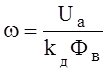
3
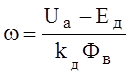
4
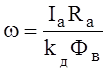
5

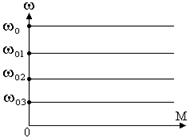
14.
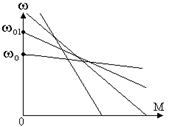
Механическая характеристика двигателя постоянного тока независимого возбуждения выглядит следующим образом:
1.
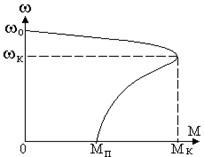
2.
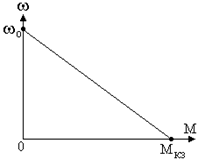
3.
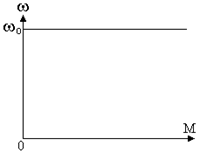
4.
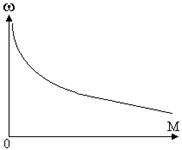
5.
15.
Частота вращения идеального холостого хода электродвигателя постоянного тока определяется выражением
1.
2.
3.
![]()
4.

5.
16.
Для перевода двигателя постоянного тока в режим динамического торможения нужно:
1.
изменить полярность приложенного к якорю напряжения и ввести в сопротивление в цепь якоря
2.
отключить двигатель от источника энергии
3.
отключить якорь двигателя от источника энергии и замкнуть обмотку якоря на тормозной резистор
4.
изменить полярность обмотки возбуждения
5.
снизить величину питающего напряжения ниже значения противо-ЭДС двигателя
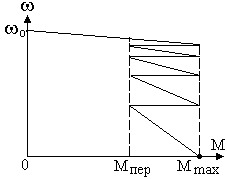
17.
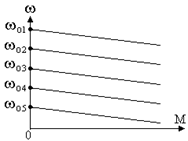
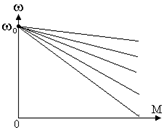
Семейство механических характеристик двигателя постоянного тока независимого возбуждения при управлении введением добавочного сопротивления в цепь якоря выглядит следующим образом:
1.
2.
3.
4.
5.
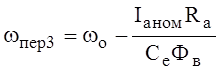
18.
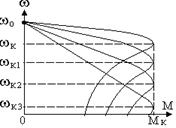
При трехступенчатом реостатном пуске двигателя постоянного тока независимого возбуждения значение частоты вращения ωпер3
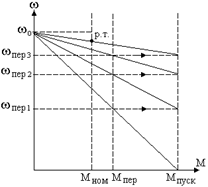 определяется выражением
определяется выражением
1.
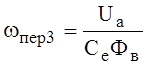
2.

3.
4.
5.
19.
Полное сопротивление пускового реостата для электродвигателя постоянного тока определяется выражением:
1.
2.
3.
4.
5.
20.
1.
2.

3.

4.

5.
21.
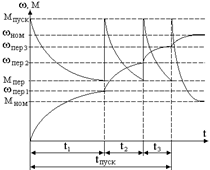 процессов при пуске двигателя постоянного тока
полное время пуска tпуск равно:
процессов при пуске двигателя постоянного тока
полное время пуска tпуск равно:
1.
2.
3.
4.
![]()
5.
![]()
22.
Уравнение электрического равновесия цепи якоря электродвигателя постоянного тока независимого возбуждения
при переводе привода в режим динамического торможения приобретает вид:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.