|
Вопросы |
Варианты ответов |
|
|
1. |
Фильтр Калмана это: |
1. Резонансный фильтр. 2. Фильтр низких частот. 3. Наблюдающее устройство. 4. Сложный регулятор. 5. Дискретный оптимальный регулятор. |
|
2. |
Корневой годограф рассчитывает траектории полюсов замкнутого контура как функцию коэффициента передачи К в предположении, что: |
1. Обратная связь положительна. 2. Обратная связь отрицательна. 3. Система нелинейная. 4. Система линейная. 5. Система многомерна. |
|
3. |
Функция lqry ППП MATLAB рассчитывает: |
1. Матрицу коэффициентов обратных связей замкнутой системы. 2. Матрицу коэффициентов управляющих сигналов. 3. Полюсы прямой ветви. 4. Выходные сигналы 5. Переходную характеристику. |
|
4. |
Постоянный шаг интегрирования выбирается для динамических систем: |
1. С большими постоянными времени. 2. С распределенными параметрами. 3. С параметрами, зависящими от времени. 4. С неизменными параметрами. 5. Для дискретных систем. |
|
5. |
Для каких систем шаг интегрирования выбирается переменный, зависящий от ошибки: |
1. Для систем с распределенными параметрами. 2. Для систем с параметрами, зависящими от времени. 3. Для систем с неизменными параметрами. 4. Для непрерывных систем. 5. Для дискретных систем. |
|
6. |
Устойчивое дифференциальное уравнение называется жестким если: |
1. Оно имеет частное решение в виде затухающих колебаний. 2. Оно имеет частное решение в виде убивающей экспоненты, постоянная времени которой очень мала по сравнению с интервалом времени на котором разыскивается решение. 3. Оно имеет частное решение в виде убивающей экспоненты, постоянная времени которой велика по сравнению с интервалом времени на котором разыскивается решение 4. Оно имеет частное решение в виде затухающих колебаний, период которых велик по сравнению с интервалом времени на котором разыскивается решение. 5. Оно имеет частное решение в виде суммы экспонент. |
|
7. |
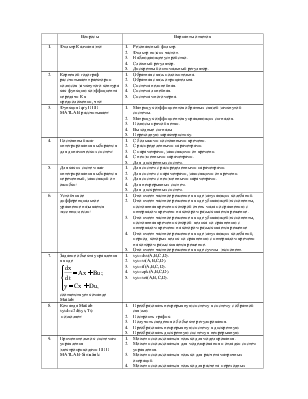
Задание объекта управления в виде
соответствует команде Matlab: |
1. sys=dss(A,B,C,D). 2. sys=ss(A,B,C,D). 3. sys=tf(A,B,C,D). 4. sys=zpk(A,B,C,D). 5. sys=set(A,B,C,D). |
|
8. |
Команда Matlab sysd=c2d(sys,Ts) позволяет: |
1. Преобразовать непрерывную систему в систему с обратной связью. 2. Построить график. 3. Получить сведения об объекте регулирования. 4. Преобразовать непрерывную систему в дискретную. 5. Преобразовать дискретную систему в непрерывную. |
|
9. |
Применительно к системам управления электроприводами ППП MATLAB-Simulink: |
1. Может использоваться только для моделирования. 2. Может использоваться для моделирования и отладки систем управления. 3. Может использоваться только для расчета матричных операций. 4. Может использоваться только для расчета переходных процессов. 5. Может использоваться для расчета математических выражений и вывода графиков. |
|
10. |
Систему управления приводом реализованную в виде программы на языке С++: |
1. Можно отладить только на контроллере. 2. Можно отладить в ППП MATLAB- Simulink. 3. Можно отладить в отдельной программе на языке С++. 4. Можно отладить в ППП MATLAB- Simulink, написав программу в виде m-функции. 5. Нельзя отладить в ППП MATLAB- Simulink. |
|
11. |
Mex-функции представляют собой: |
1. Программы на m-языке. 2. Программы с расширением exe. 3. Файлы динамических библиотек. 4. Файлы данных. 5. Файлы массивов. |
|
12. |
Инструменты rtw позволяют: |
1. Выводить трехмерные графики. 2. Работать в реальном масштабе времени. 3. Создавать программы на языке высокого уровня. 4. Создавать программы на языке Ассемблер. 5. Хранить числовые значения матриц. |
|
13. |
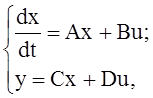
Оптимальный регулятор реализуется как: |
1. u=Kx 2. y=Du 3. x=Kx 4.
5. u= -Kx |
|
14. |
Язык программирования С++ используется, применительно к ППП MATLAB –Simulink для: |
1. Создания блок-схем 2. Вывода графики 3. Создания PDF файлов 4. Разработки S-функций 5. Разработки m-функций |
|
15. |
Цифровая модель системы управления образуется командой: |
1. sys=ss(A,B,C,D,Ts). 2. sys=ss(A,B,C,D,E). 3. sys=ss. 4. sys=ss(D). 5. sys=ss(A,B,C,D,ltisys). |
|
16. |
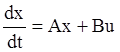
Цифровой фильтр вида
реализуется при условии: |
1. Степень n должна быть больше или равна m. 2. Степень m должна быть больше n 3. Коэффициент a0 должен быть больше b0 4. Коэффициенты при одинаковых степенях z должны быть равны 5. Коэффициент b0 должен быть больше a0 |
|
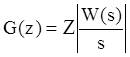
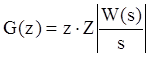
17. |
Z преобразование цифрового фильтра реализуемого на ЦВМ в виде программы по известной передаточной функции аналогового фильтра необходимо: |
1.
2.
3.
4.
5.
|
|
18. |
Цифровой ПИД- регулятор компенсирует: |
1. Одну большую постоянную времени. 2. Влияние квантования на установившуюся ошибку. 3. Все постоянные времени динамической системы. 4. Два нуля динамической системы. 5. Два полюса динамической системы. |
|
19. |
Скрытые колебания это: |
1. Колебания внутри системы и не отражающиеся на выходе. 2. Колебания на выходе системы, которые не заметны в моменты квантования. 3. Колебания на входе системы, которые не заметны в моменты квантования. 4. Колебания на входе системы, которые обусловлены эффектом квантования. 5. Колебания в замкнутой системе. |
|
20. |
По диаграмме Боде можно определить: |
1. Запас по фазе усилению и частоту среза. 2. Запас по фазе и коэффициенты обратных связей. 3. Запас по амплитуде и коэффициенты обратных связей. 4. Частотную характеристику. 5. Передаточную функцию системы. |
|
21. |
Подчиненное регулирование это: |
1. Регулирование на основании определенного закона. 2. Регулирование при настройке на технический оптимум. 3. Когда внутренний контур подчинен внешнему контуру. 4. Когда внешний контур управляется внутренним контуром. 5. Регулирование при замкнутой обратной связи. |
|
22. |
Функция оформленная как m-функция function [A,B]=Mats(X1,X2,x): |
1. Имеет один входной параметр и два выходных. 2. Имеет два входных параметра и три выходных. 3. Имеет в своем составе библиотечную функцию. 4. Имеет два выходных массива и два входных. 5. Имеет два выходных массива и три скалярных входа. |
|
23. |
Решение систем дифференциальных уравнений в ППП MATLAB производится с помощью: |
1. Интеллектуальных решателей. 2. Только метода Эйлера. 3. Сплайн аппроксимации. 4. Программы пользователя. 5. Только методом Рунге-Кутта. |
|
24. |
Для решения жестких систем дифференциальных уравнений применяют: |
1. Функции с префиксом o. 2. Функции с префиксом t. 3. Функции с префиксом tb. 4. Постоянный шаг интегрирования. 5. Функции с префиксом s. |
|
25. |
Для получения библиотечной функции в ППП MATLAB с расширением dll необходимо применить: |
1. Команду rtw. 2. Вызов библиотеки. 3. Команду mex. 4. Команду mtx. 5. Команду mex –setup. |
|
26. |
Подключение транслятора с языка С++ к ППП MATLAB производится: |
1. С помощью команды mex . 2. С помощью команды mex –setup. 3. С помощью команды mex +setup. 4. С помощью команды mex setup. 5. С помощью команды rtw. |
|
27. |
FIS-редактор в ППП MATLAB это: |
1. Редактор для построения систем с четкой логикой. 2. Редактор для программирования на языке С++. 3. Редактор для построения систем с не четкой логикой. 4. Редактор для создания нейросетевых моделей. 5. Редактор для отладки многозадачной системы. |
|
28. |
Для формирования наблюдающего устройства в ППП MATLAB необходимо: |
1. Задать систему уравнений объекта управления и указать количество выходов. 2. Задать систему уравнений объекта управления и сигналы рассогласования. 3. Линеаризовать систему уравнений объекта управления. 4. Задать желаемое размещение полюсов. 5. Задать систему уравнений объекта управления и матрицу коэффициентов обратных связей. |
|
29. |
Функции Wc=gram(sys,’c’) и Wo=gram(sys,’o’) определяют: |
1. Преобразуют одну форму управляемой системы в другую. 2. Оценивают управляемость и наблюдаемость системы. 3. Формируют канонические формы системы. 4. Предназначены для расчета амплитудных и фазовых характеристик системы. 5. Предназначены для преобразования и расчета годографа системы. |
|
30. |
Для построения модального регулятора необходимо, чтобы: |
1. Система имела один вход и один выход. 2. Система была линейной. 3. На выходе системы отсутствовали пульсации. 4. Все координаты системы были известны. 5. В системе не применялось наблюдающее устройство. |
|
31. |
Изменение скорости по треугольному графику характерно для: |
1. Следящей системы электропривода. 2. Позиционной системы электропривода. 3. Электропривода переменного тока. 4. Электропривода постоянного тока. 5. Электропривода с регулятором скорости. |
|
32. |
Предельное быстродействие в системе электропривода с упругостью определяется: |
1. Суммой малых постоянных времени. 2. Моментом инерции двигателя. 3. Постоянной времени упругих колебаний. 4. Быстродействием контура тока. 5. Быстродействием контура скорости. |
|
33. |
Разделение тока статора на составляющие определяющие момент и потокосцепление характерно для: |
1. Частотно токовой системы управления электроприводом. 2. Частотной системы управления электроприводом. 3. Электропривода с ШИМ-инвертором. 4. Электропривода с микропроцессорной системой управления. 5. Векторной системы управления. |
|
34. |
Стандартная форма Баттерворта распределения корней применяется для: |
1. Фильтрации сигналов с датчиков. 2. Рассчета корректирующего устройства. 3. Определения статистических характеристик случайных процессов. 4. Анализа частотных характеристик. 5. Дискретной аппроксимации непрерывных систем. |
|
35. |
Параметры электромеханических систем с упругими связями наиболее точно можно определить: |
1. В результате расчетов. 2. Методами идентификации реальной системы. 3. Математическим моделированием. 4. Графическим способом. 5. Подавая специальные сигналы в систему управления. |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.