




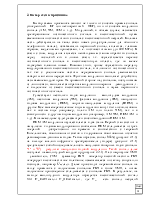


















принимающей стороне находится приёмное устройство (приёмник). В нашем случае для передачи сигнала используется метод ИКМ-АМ, причем на принимающую сторону не передаются сведения о сигнале - некогерентный приём (НКГ). Приёмник осуществляет функции приёма сигнала, его демодуляцию и распознавание. Исходя из способа передачи и приёма, приёмник имеет вид - рисунок 2.2.2. Смесь сигнала и шума Z(t) поступает на полосовой фильтр (ПФ), который предназначен для предварительной фильтрации сигналов, что уменьшает влияние помех (в присутствии только гауссовских помех не обязателен). Фильтрованный сигнал подаётся на диод (ДИОД). Он представляет собой простейший АМ-детектор. Он обрезает часть колебания, расположенную в нижней полуплоскости. Таким образом, сигнал на выходе диода является пульсирующим. Затем с помощью фильтра низких частот (ФНЧ) происходит восстановление непрерывности сигнала по времени, то есть ФНЧ осуществляет функции интегратора. После этого происходит распознавание сигнала решающим устройством (РУ). РУ осуществляет сравнение полученного сигнала с пороговым значением (например – значением "0") и, исходя из результатов такого сравнения, делается вывод какой из сигналов является эквивалентным сигналом "1", а какой – "0". Однако, из-за влияния помех может происходить искажение сигнала, то есть появление ложного сигнала "1" за счёт "0" или, наоборот, ложного сигнала "0" за счёт "1". Чтобы избежать данных ошибок, используют помехоустойчивое кодирование, принципы которого будут изложены в п. 2.8.
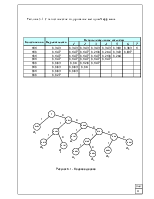
Некогерентный прием ОФМ можно реализовать в схеме с согласованным фильтром и линией задержки (рис.2).
 Рис.2 Схема оптимального некогерентного приема
с согласованным фильтром и линией задержки для сигналов ОФМ
Рис.2 Схема оптимального некогерентного приема
с согласованным фильтром и линией задержки для сигналов ОФМ
3. Расчёт вероятности ошибки на выходе приёмника
Для приемника ОФМ сигнала, вероятность ошибки при некогерентном приеме, описывается выражением
![]() (3.1)
(3.1)
где при неоптимальной фильтрации
![]() .
(3.2)
.
(3.2)
![]() – мощность сигнала на входе демодулятора,
– мощность сигнала на входе демодулятора, ![]() –
дисперсия (мощность) помехи. При оптимальной фильтрации (интегратор, как в
приемнике Котельникова, либо оптимальный фильтр в схеме демодулятора)
–
дисперсия (мощность) помехи. При оптимальной фильтрации (интегратор, как в
приемнике Котельникова, либо оптимальный фильтр в схеме демодулятора)
![]() .
.
Здесь ![]() –
энергия сигнала.
–
энергия сигнала.
По условию задания, приемник не оптимальный и потому мощность помехи равна:
 (3.3)
(3.3)
,где  -
полоса пропускания приёмника для амплитудной модуляции, Т – длительность
элементарной посылки,
-
полоса пропускания приёмника для амплитудной модуляции, Т – длительность
элементарной посылки, ![]() -
спектральная плотность мощности помех;
-
спектральная плотность мощности помех;
Отношение мощности сигнала к мощности шума - h2 или квадрат соотношения сигнал/шум - h:
![]()
Вероятность ошибки равна:
![]()
Для сравнения выбранного типа приёмника с оптимальным, вычислим вероятность ошибки для оптимального приёмника.
Полоса пропускания оптимального приёмника для амплитудной модуляции на уровне 0,7 будет следующей
![]() (3.4)
(3.4)
, где Fв – верхняя частота в спектре сигнала, а n – количество символов кодового слова, которое определяется следующим образом
![]() (3.5)
(3.5)
,где N – число уровней квантования.
Так как в данной работе рассматривается передача
голосового сигнала, для которого пик фактор П=2.5, будем иметь, что![]() =3400
Гц.
=3400
Гц.
Тогда по формуле (2.3.4) получим:
![]() , Гц.
, Гц.
Получим по формуле (2.3.3):
![]()
Отношение мощности сигнала к мощности шума - h2 и соотношение сигнал/шум - h для оптимального приёмника по формуле (2.3.2):
 ,
,
Тогда Рош для оптимального приёмника по формуле (2.3.1):
![]()
Рассчитаем длительность кодового слова для заданной системы связи:
![]() , мкс; где n - количество
символов кодового слова, а T – длительность элементарной посылки.
, мкс; где n - количество
символов кодового слова, а T – длительность элементарной посылки.
Так как длительность между посылками кодовых слов равна:
 , мкс (в теории), на практике
, мкс (в теории), на практике ![]() что
значительно больше длительности кодового слова, то можно сказать, что данная
система очень не оптимальна. Свободное же между посылками время
что
значительно больше длительности кодового слова, то можно сказать, что данная
система очень не оптимальна. Свободное же между посылками время
![]() мкс я буду использовать для увеличения длительность
элементарной
мкс я буду использовать для увеличения длительность
элементарной
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.