




Федеральное агентство по образованию
Дальневосточный государственный технический университет
(ДВПИ имени В.В. Куйбышева)
Кафедра «Радио, телевидение, связь»
Тема: Система автоматической записи информации о состоянии судна
Отчет по преддипломной практике
Выполнил студент группы Р-3011
Проверил:
Владивосток
2008
Развернутый план работы над дипломным проектом.
1. Анализ задания и выбор направления разработки.
2. Разработка технического задания.
3. Разработка и описание структурной схемы устройства
4. Выбор элементной базы
5. Разработка принципиальной схемы
5.1 Расчет приемопередатчика
5.2 Разработка флэш-памяти
5.3 Разработка устройства сбора информации
5.4 Разработка устройства определения координат
5.5 Разработка блока управления источниками питания
5.6 Разработка устройства управления аварийным приемопередатчиком
6. Описание принципа работы всей схемы в целом
7. Техникоэкономические расчеты.
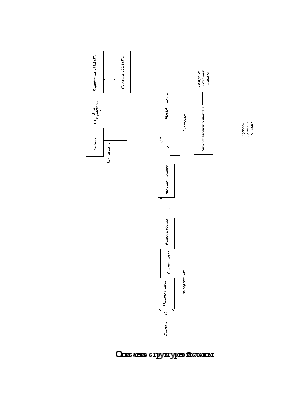
Структурная схема системы автоматической записи информации о состоянии судна

Описание структурной схемы
1. Модуль GPS. Предназначен для определения координат объекта с последующей их записью. Конструктивно выполнен в виде интегральной микросхемы.
2. Передатчик и приемник 156,8 МГц. Включаются только при аварии. Передатчик в целях экономии энергии внутреннего источника питания работает в импульсном режиме. Частота 156,8 МГц является международной частотой бедствия и вызова в морской подвижной службе (радиотелефония). Приемник в целях снижения массы работает на одну с передатчиком антенну, поэтому их работа должна быть синхронизирована.
3. Блок управления. Подает на передатчик координаты GPS в том случае, если приемник примет сигнал с другого судна (или спасательного самолета, вертолета)
4. Мультиплексор. Служит для коммутации сигналов с судовых датчиков.
5. Регистр сдвига. Предназначен для преобразования последовательного кода в параллельный. Должен синхронизироваться от микроконтроллера
6. Микроконтроллер. Главная задача – запись информации во FLASH-память. Каждую секунду считывает информацию о координатах, а также с судовых датчиков и по интерфейсу SPI передает в память. Каждые 12 часов стирает содержимое памяти. Управляет мультиплексором (выбирает источник). Синхронизирует регистр сдвига.
7. FLASH-память. Обеспечивает хранение информации.
8. Внутренний источник питания. Блок аккумуляторов, используется в аварийных случаях.
9. Блок управления питанием. Обеспечивает коммутацию судового и внутреннего источника питания. В его функцию входит подзарядка внутреннего источника питания.
Описание работы схемы в целом.
Сигнал с судовых датчиков поступает на мультиплексор, им определяется количество подключаемых датчиков. Согласно резолюции IMO А.861(20) судовой регистратор данных рейса должен обязательно записывать 15 параметров, поэтому выбран мультиплексор на 16 входов. Далее сигнал поступает на регистр сдвига, необходимый для преобразования последовательного кода в параллельный, необходимый для микроконтроллера. Микроконтроллер управляет работой мультиплексора (выбирает датчик), синхронизирует работу регистра сдвига. Помимо информации с судовых датчиков на него поступает сигнал с устройства определения координат. После получения всей информации микроконтроллер записывает ее во флэш-память. Мультиплексор, регистр сдвига, микроконтроллер образуют устройство сбора информации. Питается система от судового источника питания. В случае отключения его устройство управления источниками питания подключит внутренний источник питания, представляющий из себя аккумуляторную батарею. Для предотвращения саморазряда устройство управления постоянно подает небольшой ток. В случае аварии начинает работать аварийный приемопередатчик в импульсном режиме. Синхронизирует работу приемника и передатчика устройство управления аварийным приемопередатчиком. Как только на приемник поступит ответный сигнал от другого судна или спасательных средств, устройство управления получит информацию с устройства определения координат и отправит ее на передатчик. Таким образом, в аварийной капсуле должны находиться следующие элементы: устройство определения координат, устройство управления аварийным приемопередатчиком, приемопередатчик, флэш-память, внутренний источник питания. Остальные узлы размещаются на судне.
Список используемых источников
1. ?
2. ?
3. ?
4. ?
5. ?
6. ?
7. ?
8. ?
9. ?
10. ?
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.