![]()
Амплитудное квантование многоуровневое – так как мы применяем квантование знакопеременных выборок с постоянным шагом осуществляется в соответствии с изображенной на рисунке.
![]()
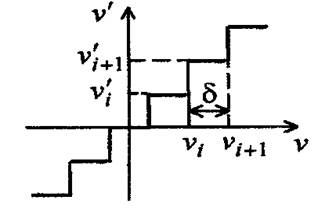
Здесь ![]() - пороги
квантования,
- пороги
квантования, ![]() - шаг
квантования,
- шаг
квантования, ![]() – дискретные значения
выходного сигнала, отнесенные к середине соответствующего интервала:
– дискретные значения
выходного сигнала, отнесенные к середине соответствующего интервала: ![]() .
.
Выбор и обоснование передающего устройства.
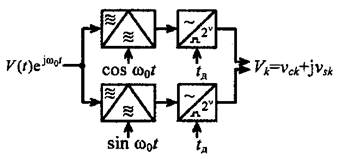
Для решения задач селекции движущихся целей на фоне пассивных помех высокочастотные колебания должны удовлетворять требованиям когерентности. Существуют несколько видов когерентности колебаний: внутренняя и внешняя когерентность, причем внутренняя когерентность может быть истинной и эквивалентной.
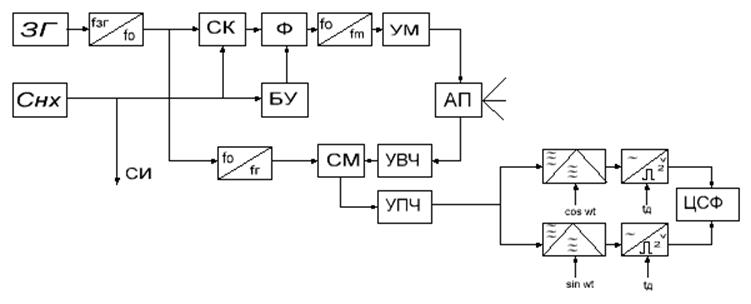
В качестве передатчика выбран
передатчик с независимым возбуждением колебаниями стабильного задающего
генератора. Его структурная схема изображена выше, где ЗГ – задающий генератор,
СК – стробируемый каскад, Ф – формирователь сложного сигнала, УМ – усилитель
мощности, БФ – блок управления формирователем сложного сигнала, АП – антенный
переключатель, УВЧ – усилитель высокой частоты, УПЧ – усилитель промежуточной
частоты. Колебания стабильного ЗГ в первом умножителе частоты преобразуются в
колебания промежуточной частоты ![]() , из которых в
СК образуются радиоимпульсы. В формирователе Ф осуществляется внутриимпульсная
модуляция, зависящая от вида формируемого сигнала и определяемая управляющим
сигналом БФ.
, из которых в
СК образуются радиоимпульсы. В формирователе Ф осуществляется внутриимпульсная
модуляция, зависящая от вида формируемого сигнала и определяемая управляющим
сигналом БФ.
Измерение дальности.
В импульсных РЛС измерение дальности
цели основано на определении времени задержки ![]() между
зондирующими и отраженными от цели импульсами, т.е.
между
зондирующими и отраженными от цели импульсами, т.е. ![]() . При цифровой
обработке с периодом временной дискретизации
. При цифровой
обработке с периодом временной дискретизации ![]() времени
задержки
времени
задержки ![]() соответствует
номер канала дальности, в котором обнаружена цель. Искомый номер определяется
при совместном обнаружении и измерении координат и равен числу импульсов
временной дискретизации, поступивших от момента излучения зондирующих импульсов
до момента приема и обнаружения отраженных сигналов.
соответствует
номер канала дальности, в котором обнаружена цель. Искомый номер определяется
при совместном обнаружении и измерении координат и равен числу импульсов
временной дискретизации, поступивших от момента излучения зондирующих импульсов
до момента приема и обнаружения отраженных сигналов.
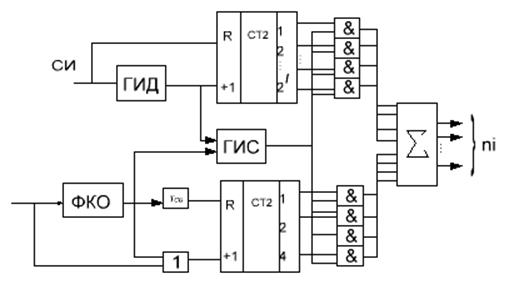
Структурная схема соответствующего
измерителя дальности приведена на рисунке и дополнительно содержит схему
фиксации конца обнаружений ФКО, линию задержки ![]() , схему ИЛИ,
двоичный счетчик обнаружений, инвертирующий регистр совпадений на схемах И-НЕ и
сумматор. Последовательность r сигналов обнаружения СО (в
идеальном случае при отсутствии шумов r = b), соответствующих одной цели, поступает на вход схемы ФКО и через
схему ИЛИ на счетный вход счетчика обнаружений.
, схему ИЛИ,
двоичный счетчик обнаружений, инвертирующий регистр совпадений на схемах И-НЕ и
сумматор. Последовательность r сигналов обнаружения СО (в
идеальном случае при отсутствии шумов r = b), соответствующих одной цели, поступает на вход схемы ФКО и через
схему ИЛИ на счетный вход счетчика обнаружений.
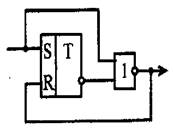
В схеме ФКО первый импульс
обнаружения переводит триггер в состояние «1», при этом инверсный вход
принимает состояние «0». Первое необнаружение в виде нуля приводит к появлению
«1» на выходе схемы ИЛИ-НЕ, которая возвращает триггер в исходное состояние, в
результате чего на выходе схемы ИЛИ-НЕ образуется импульс окончания
обнаружений. Выходной импульс схемы ФКО через схему ИЛИ поступает на счетный
вход счетчика обнаружений, показания которого теперь становятся равными r + 1. Этот же импульс поступает на генератор импульсов считывания ГИС,
который считывает показания обоих счетчиков. Считанные показания счетчика
дальности равны ![]() , где
, где ![]() - номер
кольца дальности, соответствующего последнему сигналу обнаружения. Показания счетчика
обнаружений, представленные в обратном коде, суммируются с показаниями счетчика
дальности со сдвигом на один разряд в сторону младших разрядов, сто
эквивалентно делению на два. На выходе сумматора образуется двоичный код
- номер
кольца дальности, соответствующего последнему сигналу обнаружения. Показания счетчика
обнаружений, представленные в обратном коде, суммируются с показаниями счетчика
дальности со сдвигом на один разряд в сторону младших разрядов, сто
эквивалентно делению на два. На выходе сумматора образуется двоичный код ![]() , которому
соответствует оценка дальности
, которому
соответствует оценка дальности ![]() , где
, где ![]() .
.
После завершения процессов
считывания выходной импульс схемы ФКО, задержанный на время считывания ![]() , производит
сброс показаний счетчика обнаружений.
, производит
сброс показаний счетчика обнаружений.
Анализ точности измерения дальности,
приведенный путем имитационного моделирования на ЭВМ, показывает, что
среднеквадратичная ошибка измерения ![]() . При выборе
интервала
. При выборе
интервала ![]() ошибка
измерения по сравнению с величиной, определяемой формулой уменьшается в 4.5
раза.
ошибка
измерения по сравнению с величиной, определяемой формулой уменьшается в 4.5
раза.
Измерение угловых координат.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.