S 2, УПРАВЛЕНИЕ ПО РАЗОМКНУТОМУ И ЗАМКНУТОМУ ЦИКЛАМ
Поддержание управляемой величины в определенных пределах или изменение. ее
по заданному закону в процессе работы системы может быть выполнено как по
разомкнутому, так и по замкнутому циклам управления. Поясним эти понятия на
примере системы, изображенной ![]() ма рисунке 2, которая состоит из последовательно соеди
ма рисунке 2, которая состоит из последовательно соеди![]() пенных управляемого объекта УО,
регулирующего органа РО, управляющего устройства УУ и задатчика З — устройства,
направляющего в систему задающее воздействие x(t) .
пенных управляемого объекта УО,
регулирующего органа РО, управляющего устройства УУ и задатчика З — устройства,
направляющего в систему задающее воздействие x(t) .
![]()
![]()
![]()
![]()
![]()
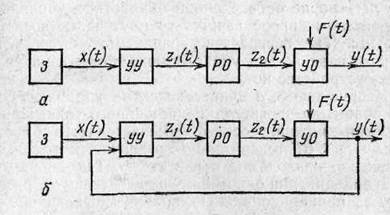
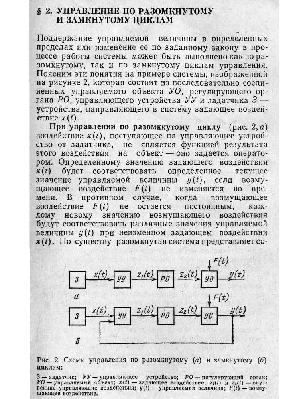
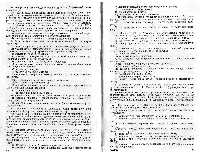
Рис. 2. Схемы управления по разомкнутому (а) й замкнутому (б) циклам:
3 — 32 датчик: УУ — управляющее устройство; РО — регулирующий орган; УО— управляемый объект; x(i) — задающее воздействие; и — внутрепние управляющие воздействия; y(t) — управ.ляемая величина; F(t) — возмущающее воздействие,
082
Р,
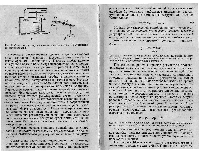
Рис. 3. Принципиальные схемы управления скоростью вращения двигателя постоянного тока по разомкнутому (а) и замкнутому (б) циклам:
Р — реостат; ОВГ — обмотка возбуждения генератора: Г — генератор; ОВД — обмоча возбуждения двигателя: Д — двигатель; ТГ — тахогенератор; ДП двигатель привода ползунка реостата; у — усилитель.
бой передаточную цепь, в которой задающее воздействие х (О после определенной обработки управляющим устройством преобразуется во внутренние воздействия (t) и Z2(t) и передается управляемому объекту но обратного воздействия управляемого объекта на управляющее устройство нет.
——t6 рисунке З, а приведена схема управления частотой
вращения двигателя Д постоянного тока. При перемещении движка реостата Р
меняется ток в обмотке возбуждения ОВГ генератора Г, а значит, и его э. д. с. и
напряжение, подводимое к двигателю. Тахогенератор ТЛ установленный на одном
валу с двигателем Д, развивает э. д. с., пропорциональную управляемой величине
— скорости вращения о вала двигателя. Подключенный к щеткам тахогенератора
вольтметр У, шкала которого проградуирована в единицах скорости вращения,
позволяет вести только визуальный контроль за управляемой величиной. Если
характеристики машин стабильны, то каждому положению движка реостата будет
соответст![]() вовать определенное значение управляемой величины— скорости вращения
двигателя при постоянном значении возмущающего воздействия — нагрузки Л! на его
валу. В данной системе убавляющее устройство (генератор) воздействует на
управляемый объект (двигатель), но об
вовать определенное значение управляемой величины— скорости вращения
двигателя при постоянном значении возмущающего воздействия — нагрузки Л! на его
валу. В данной системе убавляющее устройство (генератор) воздействует на
управляемый объект (двигатель), но об![]() ратного воздействия нет: система
работает по разомкну-
ратного воздействия нет: система
работает по разомкну-![]()
тому циклу.
По замкнутому циклу система работает (рис. 2, а). ![]() если соединить ее выход с управляющим
устройством
если соединить ее выход с управляющим
устройством ![]() так, чтобы на него все время поступало два воздейст
так, чтобы на него все время поступало два воздейст![]() вия —с задатчика и с выхода
управляемого объекта. Та
вия —с задатчика и с выхода
управляемого объекта. Та![]() ким образом, в данной системе существует воздействие не только
управляющего устройства на объект, но И
ким образом, в данной системе существует воздействие не только
управляющего устройства на объект, но И ![]() объекта на управляющее устройство.
объекта на управляющее устройство.![]()
На рисунке 3,6 приведена схема. управления скоро![]() стью вращения двигателя Д постоянного
тока, в которой
стью вращения двигателя Д постоянного
тока, в которой ![]() выход системы посредством тахогенератора ТГ, реостата Р1, усилителя У и
двигателя ДП привода ползунка реостата Р соединен с входом системы. Здесь ведет
выход системы посредством тахогенератора ТГ, реостата Р1, усилителя У и
двигателя ДП привода ползунка реостата Р соединен с входом системы. Здесь ведет![]() ся автоматический контроль скорости
вращения двигателя.
ся автоматический контроль скорости
вращения двигателя.
скорости вращения, все время сравнивается с постоянным
значением напряжения И), и разность между ними в ви![]() де через усилитель У подается на
двигатель ДГ]. Любое изменение скорости вращения приведет к
де через усилитель У подается на
двигатель ДГ]. Любое изменение скорости вращения приведет к
![]()
появлению сигнала на двигателе ДГ],
который переместит ползунок реостата Р в ту или другую сторону, в ре. зультате
чего при уменьшении или увеличении скорости ![]() вращения двигателя Д по какой-либо
причине ток в обмотке возбуждения ОВГ генератора увеличивается или уменьшается,
что приведет к соответствующему
вращения двигателя Д по какой-либо
причине ток в обмотке возбуждения ОВГ генератора увеличивается или уменьшается,
что приведет к соответствующему ![]() изменению напряжения генератора, а следовательно, и к возвращению
регулируемой величины к заданно-
изменению напряжения генератора, а следовательно, и к возвращению
регулируемой величины к заданно- ![]() му значению.
му значению.
![]()
![]() система, на которую влияют
изменяющиеся возмущающие воздействия, не может самостоятельно, без вмеша
система, на которую влияют
изменяющиеся возмущающие воздействия, не может самостоятельно, без вмеша![]() тельства человека, стабилизировать
режим своей работы. Замкнутая же система автоматически реагирует на любые
изменения.
тельства человека, стабилизировать
режим своей работы. Замкнутая же система автоматически реагирует на любые
изменения.
![]() З. ПРИНЦИПЫ АВТОМАТИЧЕСКОГО
З. ПРИНЦИПЫ АВТОМАТИЧЕСКОГО ![]() УПРАВЛЕНИЯ
УПРАВЛЕНИЯ
При построении автоматических систем решают, как наиболее простым и технико-экономически обоснованным образом получить и передать необходимый объем информадии, который требуется для достижения цели управления. Несмотря на многообразие и различие технологических процесов и методов и средств автоматики в управлении можно выделить ряд общих основополагающих принципов. К ним относят принципы управления по отклонению, по возмущению, комбинированный и адаптации. Принцип автоматического управления определяют, как и на основе какой
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.