









































расчетная постоянная времени изменения апериодического тока для схемы.
Tacx = TacIIпос ++TIaподдIпод . (2.13)
пос
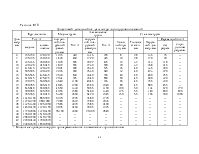
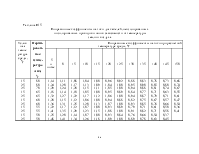
Постоянная времени системы Тас определяется по таблице 2.2, а постоянная времени апериодической оставляющей эквивалентного двигателя можно принимать Тад = 0,04 с.
Таблица 2.3
|
Электрическая система, элемент системы |
Та, с |
kу |
|
Турбогенераторы мощностью, МВт: 12 – 60 100-1000 |
0,16 – 0,25 0,4 – 0,54 |
1,940 – 1,955 1,975 – 1,980 |
|
Блок турбогенератор (60 МВт) – трансформатор при номинальном напряжении генератора, кВ: 6,3 10,5 |
0,20 0,15 |
1,95 1,935 |
|
Блок турбогенератор – повышающий трансформатор при мощности генератора, МВт: 100 – 200 300 500 800 |
0,26 0,32 0,35 0,30 |
1,965 1,977 1,983 1,967 |
|
Система, связанная с шинами, где рассматривается КЗ, воздушными линиями напряжением, кВ: 35 110 – 150 220 – 330 500 - 750 |
0,02 0,02 – 0,03 0,03 – 0,04 0,06 – 0,08 |
1,61 1,61 – 1,72 1,72 – 1,78 1,85 – 1,89 |
|
Система, связанная со сборными шинами 6 – 10 кВ через трансформаторы единичной мощностью, МВ⋅А: 80 и выше 32 – 80 32 и ниже |
0,06 – 0,15 0,05 – 0,1 0,045 – 0,07 |
1,85 – 1,935 1,82 – 1,90 1,80 – 1,85 |
|
Ветви, защищенные реактором с номинальным током, А: 1000 и выше 630 и ниже РУ 6 – 10 кВ |
0,23 0,10 0,01 |
1,956 1,90 1,37 |
Следует отметить, что во многих случаях токоведущие части имеют значительные запасы по термической стойкости. Поэтому допускается выполнять расчет термического импульса по выражению Bк = Iпо2 (tотк +Та), дающему несколько завышенный результат, и, в случае необходимости, можно уточнить значение импульса по формулам для схемы "двухлучевая звезда".
Пример 2.1:
Определить минимальное термически стойкое сечение для шин РУ-10 кВ подстанции с трансформаторами ТДТН-40000 кВ⋅А, UкВН=22%. К секции шин подключены высоковольтные электродвигатели SΣ=12 МВ⋅А. Ток КЗ в распредустройстве 220 кВ Iпо=4,8 кВ. Пусковой ток эквивалентного электродвигателя I*п=5,6. Время отключения КЗ tотк=tрз + tов=1+1,1=1,1 с.
Решение:
Определим токи КЗ в РУ-6 кВ
Sб=100
мВ; Uб=6,3 кА; Iб6=9,18 кА; Iб .
.
Сопротивление системы
X*c = IIб220к1
= ![]() 04,25,8 = 0,0521. по
04,25,8 = 0,0521. по
 Sсист
К Sэд
Sсист
К Sэд
Сопротивление трансформатора
![]()
![]() X*т = Uк ⋅ Sб = 22 ⋅100 = 0,55.
X*т = Uк ⋅ Sб = 22 ⋅100 = 0,55.
100 Sп 100 40
Ток короткого замыкания от системы в РУ-6 кВ
![]() Iпоск2 = Х*сI+б6Х*т = 09,602,18 =15,25кА.
Iпоск2 = Х*сI+б6Х*т = 09,602,18 =15,25кА.
Начальное значение тока КЗ от эквивалентного электродвигателя
Iпд
 .
.
Определим термический импульс короткого замыкания в РУ-6 кВ.
Bкп = Iпос2 tоткл + 0,5Iпод2 Тпд + 2IпосIподТпд =15,252 ⋅1,1+ 0,5⋅6,172 ⋅0,07+
+ 2⋅15,25⋅6,17⋅0,07 = 255,82+1,33+13,17 = 270,3кА2 ⋅с;
Вка=(15,25+6,17)2 Тасх = 21,422⋅0,069 = 31,66 кА2⋅с;
Tacx
=TacIIпос ++TIaподдIпод =15![]() ,25⋅0,0821,+426,17⋅0,04 = 0,069с;
,25⋅0,0821,+426,17⋅0,04 = 0,069с;
пос
Вк = 302 кА2⋅с = 302⋅106 А2⋅с.
Минимальное термически стойкое сечение алюминиевых шин
qmin  .
.
При определении Вк без учета затухания тока электродвигателей Вк = 21,522 ⋅1,1 = 504 кА2⋅с;
q .
.
Таким образом, расчет по упрощенному выражению завышает сечение почти на 30 %, но при этом для расчетной схемы оно значительно меньше выбранного сечения шины по условиям длительного режима.
2.2. Динамическая стойкость проводников
Жесткие шины, укрепленные на изоляторах, представляют собой динамическую колебательную систему, находящуюся под воздействием электродинамических сил. В такой системе возникают колебания, частота которых зависит от массы и жесткости конструкций. Электродинамические силы, возникающие при КЗ, имеют составляющие, которые изменяются с частотой 50 и 100 Гц. Если собственные частоты колебательной системы шины — изоляторы совпадут с этими значениями, то нагрузки на шины и изоляторы возрастут. Если собственные частоты меньше 30 и больше 200 Гц, то механического резонанса не возникает. В большинстве практически применяемых конструкций шин эти условия соблюдаются, поэтому ПУЭ не требуют проверки на электродинамическую стойкость с учетом механических колебаний. В частных случаях, например при проектировании новых конструкций РУ с жесткими шинами, производится определение частоты собственных колебаний для алюминиевых шин:
 f0
= 173l2,2 Jq
; (2.14) для медных шин
f0
= 173l2,2 Jq
; (2.14) для медных шин
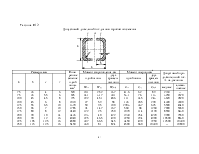
f0 = 125l2,2 Jq , (2.14) где l - длина пролета между изоляторами, м; J - момент инерции поперечного сечения шины относительно оси, перпендикулярной направлению изгибающей силы, см4; q - поперечное сечение шины, см2.
Изменяя длину пролета и форму сечения шин, добиваются того, чтобы механический резонанс был исключен, т. е. f0 > 200 Гц. В этом случае проверка шин на электродинамическую стойкость производится в предположении, что шины и изоляторы являются статической системой с нагрузкой, равной максимальной электродинамической силе, возникающей при КЗ.
Наибольшие электродинамические усилия возникают обычно при трехфазном коротком замыкании. Поэтому в дальнейших расчетах на динамическую стойкость учитывается ударный ток трехфазного КЗ.
Равномерно распределенная сила f создает изгибающий момент, Н/м (шина рассматривается как многопролетная балка, свободно лежащая на опорах)
fl 2
M
= ![]() ,
,
10
где f – длина пролета между опорными изоляторами шинной конструкции, м.
При расположении шин в плоскости наибольшие динамические нагрузки
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.