Задание1: построить модель двигателя постоянного тока с запуском в три ступени (0,5; 0,25 и 0,1 Ом) в функции времени и динамическим торможением на полном сопротивлении.
1.1 Построим модель двигателя в MATLAB 6.5 с возможностью регулирования сопротивления в якоре и подаваемого на обмотку якоря напряжения
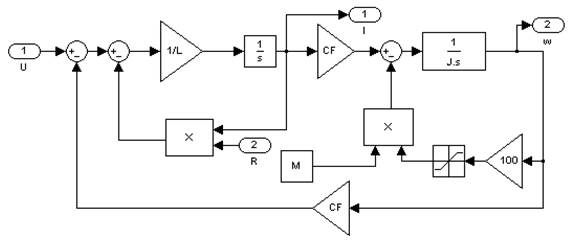
Рисунок 1.1 Модель двигателя постоянного тока
1.2 Используя теорию автоматных граф смоделируем пуск и торможение двигателя с помощью приложения Simulink/state flow
Рисунок 1.2
Т.е. при пуске, из обмотки якоря, будет выводиться, через каждых 0,5 сек, сопротивления по 0,25 и 0,15 Ом, сопротивление обмотки якоря при этом 0,1 Ом. При переводя ключа (рис. 1.3) в положение 1 происходит запуск двигателя, при переводе в 0 – торможение.
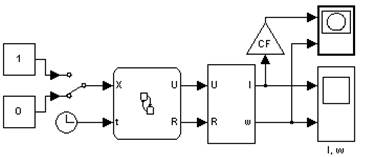
Рисунок 1.3
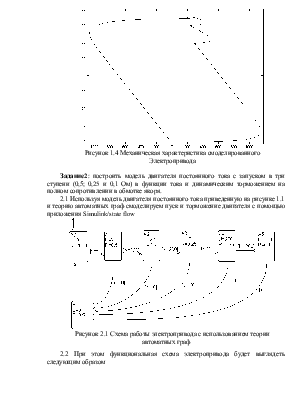
1.3 Приведем результат моделирования с помощью механической характеристики привода
Рисунок 1.4 Механическая характеристика смоделированного
Электропривода
Задание2: построить модель двигателя постоянного тока с запуском в три ступени (0,5; 0,25 и 0,1 Ом) в функции тока и динамическим торможением на полном сопротивлении в обмотке якоря.
2.1 Используя модель двигателя постоянного тока приведенную на рисунке 1.1 и теорию автоматных граф смоделируем пуск и торможение двигателя с помощью приложения Simulink/state flow
Рисунок 2.1 Схема работы электропривода с использованием теории автоматных граф
2.2 При этом функциональная схема электропривода будет выглядеть следующим образом
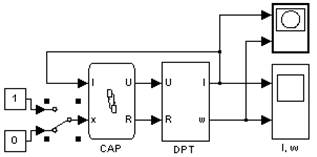
Рисунок 2.2
Уровень логической единицы соответствует пуску двигателя с полным сопротивлением в роторе. Когда вал двигателя приобретает определенную скорость ток в якоре двигателя, с ростом противоэдс, уменьшается, при достижении тока срабатывания = 200 А, выводится первая ступень сопротивлений, и ток начинает повышаться, скорость растет увеличивая противоэдс, что в свою очередь уменьшает ток, до тока срабатывания 200 А, после которого выводятся оставшиеся сопротивления из якоря двигателя и двигатель выходит на естественную характеристику. При подаче на вход «Х» уровня логического нуля, двигатель переходит в динамическое торможение с полным сопротивлением в якоре, торможение продолжается до момента пока ток в якоре не станет равным нулю.
2.3 Подтвердим описанное выше, электромеханической характеристикой
![]()
![]()
Рисунок 2.3 Электромеханическая характеристика спроектированного электропривода
Вывод: разработанные выше схемы позволяют получить форсированный пуск, в сравнении с пуском при полном сопротивлении в якоре, при этом, при правильном подборе пусковых сопротивлений, пусковой ток не превысит допустимых значений, как это наблюдается при прямом пуске двигателя. В результате выполнения практической работы были получены схемы, полностью удовлетворяющие требованиям задания.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.