СИСТЕМА СКАЛЯРНОГО УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА
1 С помощью средств MATLAB6p5/Simulink смоделируем предложенную схему
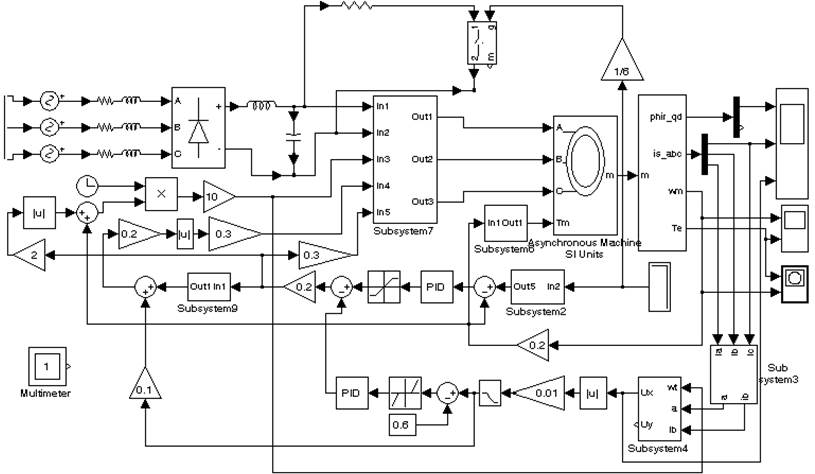
Рисунок 1 Система скалярного управления частотным приводом
2 Проанализируем предложенную схему. Преобразователь частоты получает питание от симметричного трехфазного источника питания (U = 310 В, f = 50 Гц). ПЧ состоит из автономного инвертора напряжения, неуправляемого выпрямителя и индуктивно-емкостного фильтра (емкостная составляющая превалирует). Управление выпрямителями происходит с использованием принципа широтно-импульсной модуляции (f=1500 Гц).
Схемой предусмотрено динамическое торможение. В момент времени, когда на задание поступает нулевой сигнал, на две фазы двигателя подается постоянное напряжение, за счет чего вращающееся магнитное поле статора сменяется неподвижным в пространстве, и, взаимодействуя с полем ротора, направленным противоположно, возникает тормозной момент.
Схема имеет два параметра регулирования, это частота и напряжение статора, их отношение должно поддерживаться постоянным. Для компенсации падения напряжения во внутренних сопротивлениях ПЧ и возможных колебаний напряжения его питающей сети добавлен контур напряжения.
Задание по скорости формируется
блоком Timer с помощью задатчика интенсивности, для ограничения
токов и моментов асинхронного двигателя при его пуске. Далее через коэффициент
0,2 (Zp/(2![]() )), угловая частота переводится в частоту fз. С помощью функционального преобразователя предусматривается
такое соотношение между напряжением задания на частоту и на напряжение на
выходе ПЧ, при котором обеспечивается компенсация падения напряжения на
активном сопротивлении обмоток статора.
)), угловая частота переводится в частоту fз. С помощью функционального преобразователя предусматривается
такое соотношение между напряжением задания на частоту и на напряжение на
выходе ПЧ, при котором обеспечивается компенсация падения напряжения на
активном сопротивлении обмоток статора.
3 Запустив схему, снимем необходимые осциллограммы.
|
|
|
|
|
 М, Нм
М, Нм
Рисунок 2 Изменение скорости и момента двигателя во времени, и механическая характеристика системы скалярного управления
4 Вывод: при множестве вариантов решения определенной задачи, выбирается наиболее простой, экономичный вариант, при условии соблюдения всех требований задания. Систему скалярного управления следует применять в случае, когда не требуется большого диапазона регулирования и высокой жесткости характеристик (см. тахограмму). Из множества систем управления частотными приводами система скалярного управления является наиболее простой.
 Министерство образования Российской
Федерации
Министерство образования Российской
Федерации
Уральский государственный технический университет - УПИ
Нижнетагильский технологический институт (филиал)
Кафедра автоматизации технологических процессов и систем
Оценка _______________
Комиссия _____________
_______________________
Отчет по лабораторной работе №5
по дисциплине «Системы управления электроприводов»
|
Руководитель Студент№ группы |
И.Н. Исаев А.М. Горностаев306 ЭАПУ |
Нижний Тагил
2007
 Министерство образования Российской
Федерации
Министерство образования Российской
Федерации
Уральский государственный технический университет - УПИ
Нижнетагильский технологический институт (филиал)
Кафедра автоматизации технологических процессов и систем
Оценка _______________
Комиссия _____________
_______________________
Отчет по лабораторной работе №7
по дисциплине «Системы управления электроприводов»
|
Руководитель Студент№ группы |
И.Н. Исаев А.М. Горностаев306 ЭАПУ |
Нижний Тагил
2007
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.