Основная проблема постановки задачи оптимизации – формулирование целевой функции. В первую очередь это связано с тем, что вектор выходных параметров проектируемой ТС не может выступать в качестве целевой функции, поскольку, в силу функциональной зависимости выходных параметров от входных, невозможно улучшение всех выходных параметров одновременно, независимо друг от друга в процессе решения задачи оптимизации.
Если среди выходных параметров можно выделить один, наиважнейший, который максимально характеризует свойства объекта, то его принимают в качестве целевой функции. При этом остальные выходные параметры относятся к ограничениям в виде соответствующих условий работоспособности. Такой выбор целевой функции лежит в основе критериев оптимальности, которые называют частичными критериями.
Например, при расчетах металлоконструкций в качестве целевой функции принимают или запас прочности, или запас стойкости. Остальные условия работоспособности относятся к ограничениям задачи.
Как видим, задача оптимизации является сложной, многоплановой проблемой. Перейдем теперь к методам ее решения. Их рассмотрение проведем на базе математической постановки задачи однокритериальной оптимизации.
Пусть заданы:
1) f(x) – целевая функция (функция эффективности), определяющая степень эффективности в достижении определенной цели;
2) х – множество возможных решений (управляющих параметров);
3) хÎРÌRn – система ограничений (система условий задачи).
Необходимо определить значение х*, которое удовлетворяет условиям (ограничениям) задачи, при котором целевая функция f(x) принимает экстремальное значение: f(x)®min или f(x)®mах.
Если в задаче оптимизации вместо ограничения общего вида хÎРÌRn рассматривается отдельный вид ограничения, а именно: gi(x)=0, i=1, …, m, xÎP, то имеем так называемую классическую задачу на условный экстремум.
Если вместо этого рассматривают следующий отдельный вид ограничений: gi(x)<=0, i=1, …, k; gi(x)=0, i=k+1, …, m, xÎP; xi>bi, i=1, …, m, то имеем так называемую задачу математического программирования.
При классификации задач однокритериальной оптимизации в такой общей математической постановке критерием классификации может выступать любой математический объект:
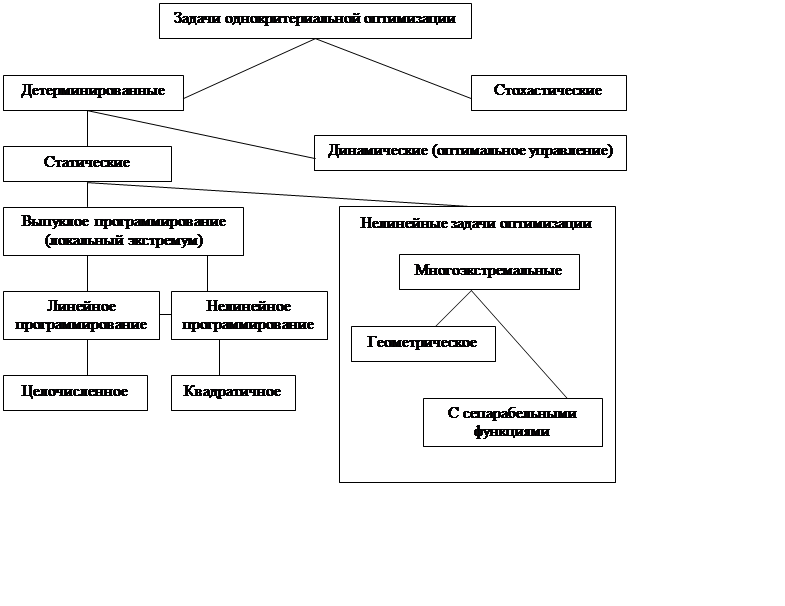
Учитывая это, можно провести следующую классификацию задач оптимизации (рис.2).
Если в качестве критерия классификации выбрать характер управляющих переменных, который отражает их вероятное поведение или детерминированные свойства, то задачи оптимизации можно разбить на две группы – детерминированные и стохастические.
Если в качестве критерия классификации выбрать систему ограничений, то задачи оптимизации разбивают на классы: условной и безусловной.
Если решение х* задачи оптимизации является функцией времени х(t), то приходим к классу задач оптимизации динамических систем. Если критерием оптимальности является некоторый функционал, приходим к так называемым задачам оптимального управления. Задачи, не относящиеся к этому классу, условно назовем статическими. Группа детерминированных статических задач разбивается на одно-экстремальные (задачи выпуклого программирования) и многоэкстремальные.
В зависимости от вида функции f(x) каждая из этих групп разделяется на соответствующие задачи, такие как линейного программирования, нелинейного программирования и т.п.
В конце концов, в задаче оптимизации указанные виды множеств допустимых значений могут состоять из непрерывных или дискретных величин. В последнем случае приходим к задаче дискретной оптимизации, такой, например, может быть задача линейного целочисленного программирования.
|
Структура системы |
Функции |
|
|
Т |
|
К, Р |
|
|
ППЭ |
|
|
К, Р |
|
|
Т |
|
|
К, Р |
|
|
ППЭ ППЭ |
|
|
К, Р |
|
|
Т |
|
|
К, Р |
|
|
ПВЭ |
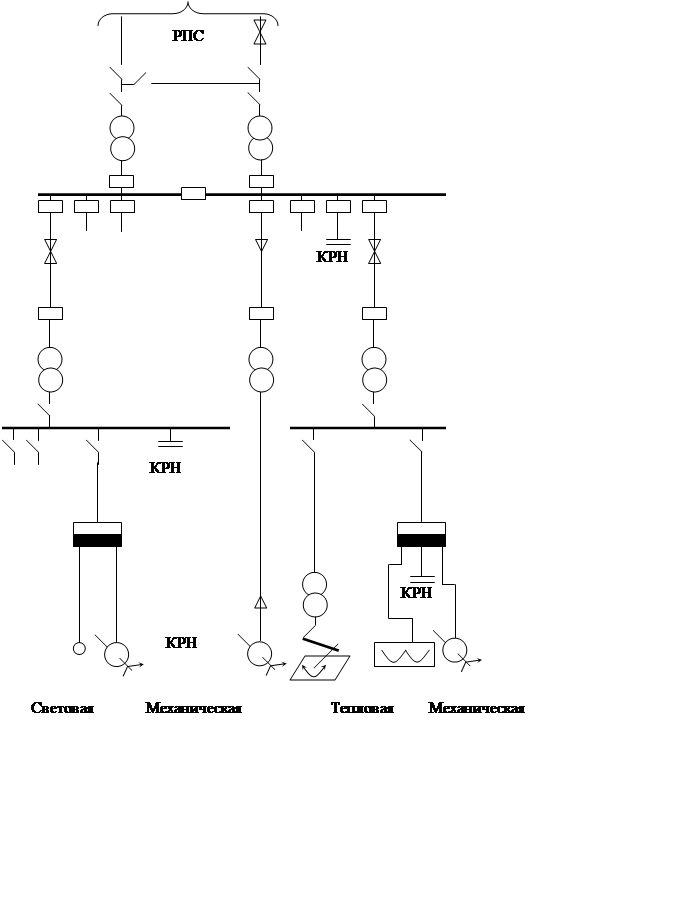
Рисунок 1 - Структурно-функциональная схема системы электроснабжения
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.