Выберем параметры элементов для настройки микросхемы на нужную частоту.

Резисторы ОМЛТ-0,125Вт номиналами по: R1=3кОм, R2 - нет, R3 – реостат на 100кОм, R4 - нет, R5=R7=100 Ом, R6=5кОм, R8=R9=R10=R12=15кОм, R11=500кОм.
Диоды высокочастотные SF12.
Конденсаторы МБГО-1 номиналами по: C1=5мкФ, C2=22,5пФ, C3=1мкФ, C4=0,1мкФ. Выходы микросхемы соединены параллельно и сопротивления R5 и R7 подобраны так, чтобы обеспечивать 1,5-кратное открывание силового VT.
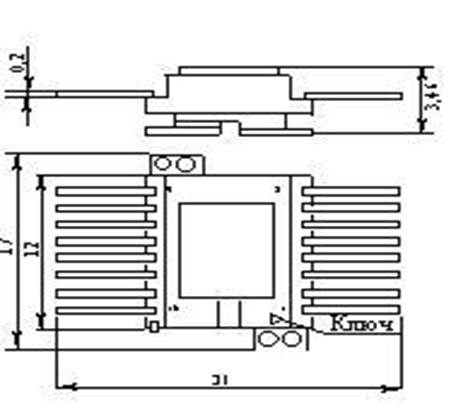
Рис. 9 1114ЕУ3
8. Статический расчет.
Цель статического расчета – определение коэффициентов усиления. Для этого сначала определим эквивалентное сопротивление цепи, при этом часть силовой цепи до дроссель-трансформатора нужно привести к части после него.
R1=0,1Ом, R2=0,5Ом
Rвд2=0,35ΔUвпр/Iв=0,35*1/5=0,07Ом
Rвд1=0,35ΔUвпр/Iв=0,35*1,2/5=0,08Ом
![]()
![]()
Из формулы ΔUр=2,1В, а ΔUз должно быть меньше 0,36В.
Uосн=Uз=5В, тогда:
 ,
,  ,
,
Проверим полученный результат:
 , что
меньше допустимого.
, что
меньше допустимого.
9. Питание микросхемы 1114ЕУ3.
Микросхема 1114ЕУ3 может быть запитана постоянным напряжением от 9 до 36 вольт, причем компоновка микросхемы включает в себя стабилизатор напряжения, что позволяет не бояться пульсаций питающего напряжения. Таким же нестабилизированным напряжением можно запитать и коллекторную цепь микросхемы 1114ЕУ3. На рис. 10 приведена схема, где:
Т1 – трансформатор ТР237-115-400 на рис.11 (Р=45ВА, I1=0,6А, Ud2=16В, Ud3=7,1В, Ud4=1,6В, I2=0,91А), VD1-VD4 – HER101 (Uобм=50В, Iм=1А), С1 – К50-27 1000мкФ – 160В. При изменении входного напряжения на 10% колебание напряжения питания будет от 12,96В до 15,84В.
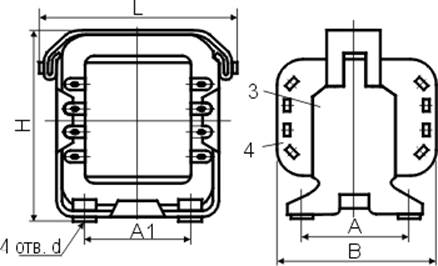
Рис. 11 ТР237-115-400
10. Защита ВИП.
На рис. 12 приведена схема токовой защиты нагрузки ВИПа, которая встраивается сразу после ТОК. Схема настроена так, что при превышении тока нагрузки больше 2А открывается VD1з и открывает VT1з, через который потечет ток. Напряжение на R1з откроет VS1з и ток короткого замыкания разомкнет F1. При необходимости величину размыкающего тока можно отрегулировать сопротивлением Rшз. В данном примере были подобраны следующие параметры и элементы схемы:
F1 – автоматический размыкатель DLS SACB 70 на ток 70А, VD1з – SF12 (Uобм=100В, Iм=1А), VT1з –КТ709А (Uкэ=100В, Iк=10А, h21э=500, fгр=3МГц, ΔUкэ=2В), VS1з – Т142 (Uобм=500В, Iм=80А), R1з – ОМЛТ – 100Вт – 50Ом+10%, Rшз – KNP-200 - 2Вт – 0,5Ом. На рис. 13 – автоматический прерыватель DLS SACB 70, на рис. 14 – тиристор Т142.
Рис. 13 DLS SACB 70
Рис. 14 Тиристор T142
11. Динамический расчет.
Цель динамического расчета – отследить реакцию системы на возмущения, то есть определить степень устойчивости. Если система неустойчива – скорректировать ее добавлением корректирующего звена.
Определим реакцию системы на единичный скачок по управляющему воздействию. Для этого нужно определить постоянные времени. Схема трансформаторного однотактного конвертора с емкостным фильтром на выходе можно представить как индуктивно-емкостной фильтр.
 , где
, где
 ,
, ![]() .
.
Введем следующую структуру в MATLAB:
На рис. 15 К – это произведение трех коэффициентов: К=Кос*Кпу*Кп. После проверки оказывается, что система неустойчива. Введем корректирующее звено, которое изогнет ЛАХ на +20дБ/дек на частоте 10000Гц и на -20дБ/дек на частоте 1МГц. На рис. 16 скорректированная схема:
Скорректированная система устойчива, время переходного процесса составляет менее 1мс. График переходного процесса на рис. 17, на рис. 18 схема корректирующего звена.
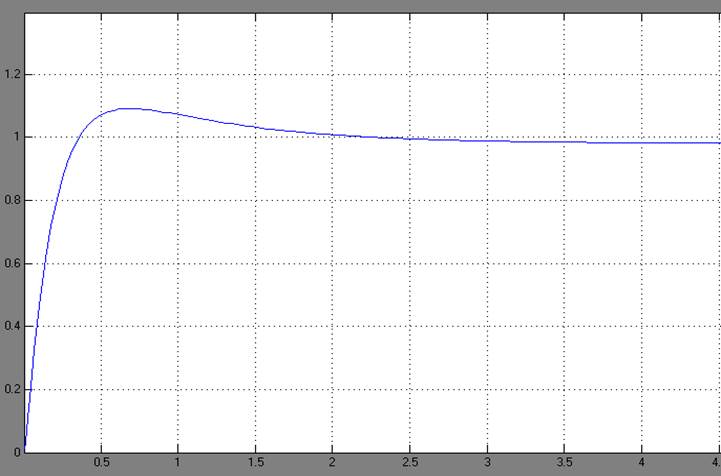
Рис. 17
Рис. 18
 , где R1=50кОм,
R2=250кОм, С1=2нФ, С2=4пФ, 5-ти кратная разница R1 и R2
обеспечивает нам коэффициент предварительного усиления.
, где R1=50кОм,
R2=250кОм, С1=2нФ, С2=4пФ, 5-ти кратная разница R1 и R2
обеспечивает нам коэффициент предварительного усиления.
12. Вывод.
Данное техническое задание на проектирование выполнено в полном объеме.
Список литературы:
1. Мартынов А.А. Проектирование вторичных источников питания. Проектирование ВИП с выходом на постоянном токе: Учеб. пособие/СПбГУАП. СПб., 2000.
2. Мартынов А.А. Справочные данные по элементной базе для курсовых проектов по дисциплинам «Проектирование электроприводов», «Проектирование вторичных источников питания», Полупроводниковые устройства систем управления». СПб., 2003.
3. Мартынов А.А. Проектирование электроприводов: Учеб. пособие/СПбГУАП. СПб., 2004.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.