

Аппаратно-программная реализация устройства
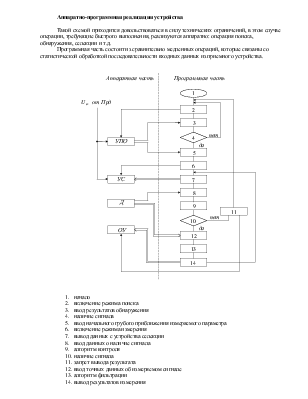
Такой схемой приходится довольствоваться в силу технических ограничений, в этом случае операции, требующие быстрого выполнения, реализуются аппаратно: операция поиска, обнаружения, селекции и т.д.
Программная часть состоит из сравнительно медленных операций, которые связаны со статистической обработкой последовательности входных данных из приемного устройства.
1. начало
2. включение режима поиска
3. ввод результатов обнаружения
4. наличие сигнала
5. ввод начального грубого приближения измеряемого параметра
6. включение режима измерения
7. вывод данных с устройства селекции
8. ввод данных о наличие сигнала
9. алгоритм контроля
10. наличие сигнала
11. запрет вывода результата
12. ввод точных данных об измеряемом сигнале
13. алгоритм фильтрации
14. вывод результатов измерения
Это один из возможных вариантов взаимодействия программного алгоритма и дополнительных аппаратных функций, играющих роль внешних устройств. В качестве вычислителя либо микропроцессор, либо компьютер. Схема наглядно демонстрирует, что МП устройства представляют собой комбинацию вычислителя со стандартной структурой и специальных внешних устройств. Эти внешние устройства используются для согласования требуемого объема и скорости вычисления с вычислительными возможностями МП комплекта.
Такие устройства обычно выполняются на интегральных микросхемах малого и среднего уровня интеграции. Из рассмотренных вариантов схем видно, что наиболее распространенными являются устройства поиска и обнаружения, оно выполняет функцию предварительной грубой фиксации измеряемого параметра, затем дискриминационными устройствами это значение уточняется.
Эти устройства являются неотъемлемой частью РТС при полностью аппаратной реализации и являются дополнительными устройствами при смешанной реализации. К ним также относят АЦП и ЦАП.
Устройства ЦОС на дискретных элементах
Алгоритм работы устройства поиска и обнаружения импульсных сигналов
Одна из основных особенностей РТС измерения это необходимость предварительного поиска и селекции полезного сигнала, принимаемого на фоне помех. Подобная селекция на определенных свойствах регулярности полезного сигнала, которые отличают его от случайного мешающего фона. Эта регулярность проявляется при продолжительном анализе смеси сигнала и помехи. Результатом анализ является:
ü Принятие решения о наличии или отсутствии полезного сигнала
ü Грубая оценка неизвестного сигнального параметра, нужная для последующей обработки
Первый результат завершает операцию обнаружения сигнала, а второй операцию поиска неизвестного значения параметра. Обе операции называют поиском сигнала по известному параметру (частота, время задержки и т.д.). указанные параметры являются основными при обработке РТС сигналов. Поиск по частоте выполняется с помощью аналоговых частотно-избирательных устройств, поиск по фазе рассматривают как разновидность поиска по времени, поэтому с т.з. цифровой реализации интерес представляет последняя операция.
Целью поиска является регистрация факта прихода полезного импульсного сигнала, при одновременной фиксации момента прихода полезного сигнала с точностью необходимой для функционирования алгоритма. При аппаратной реализации наиболее рациональной будет погрешность соизмеримая с длительностью импульса.
Когда используется МП это условии не является обязательным. Главную роль играют возможности дополнительных аппаратных затрат и характеристики системы в целом. Для точечных импульсов результат операции поиска сводится к выработке селекторных импульсов (стробов), соответствующих исходной ожидаемой последовательности. Операция поиска считается выполненной правильно, если стробы, установленные по результатам среднего анализа смеси сигнала и помехи, совпадают по времени с полезными сигнальными импульсами.
Под влиянием помех может наблюдаться ошибочный результат поиска и обнаружения. Обнаружение сигнала в момент не совпадающий с истинным моментом прихода сигнала, либо принятие решения об отсутствии сигнала при его наличии.
Возможны две ошибки это ложная тревога и пропуск цели. Вероятности этих ошибок характеризуют качество процедуры поиска и обнаружения сигнала, кроме этого важными техническими характеристиками являются разрешающая способность, время поиска, т.е. время нужное на выполнение операций по статистической обработке принятой смеси сигнала и помех.
Эти характеристики определяются используемым алгоритмом поиска и обнаружения, обычно стараются использовать оптимальные алгоритмы поиска и обнаружения.
Разработка таких алгоритмов это предмет теории статистического синтеза РЭС. Рассмотрим, как эти алгоритмы реализуются с помощью цифровых систем:
![]()
 - где
К – порог обнаружения.
- где
К – порог обнаружения.
Это и есть оптимальный алгоритм.
Он заключается в вычислении статистики ![]() и сравнении
ее с некоторым порогом К, вычисление этого порога влияет на вероятности ошибок
первого и второго рода (ложная тревога и пропуск цели). Если
и сравнении
ее с некоторым порогом К, вычисление этого порога влияет на вероятности ошибок
первого и второго рода (ложная тревога и пропуск цели). Если ![]() - сигнал обнаружен, а значение
- сигнал обнаружен, а значение ![]() это и есть грубая оценка
это и есть грубая оценка ![]() . Это корреляционный интеграл.
. Это корреляционный интеграл.
 следовательно
следовательно
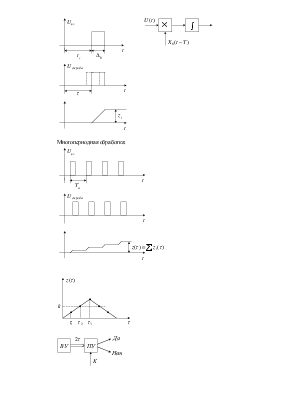
Формирование ![]() разобьем на два этапа
разобьем на два этапа
ü Оптимальная внутрипериодная обработка
ü Накопление результатов внутрипериодной обработки за время пачки
В общем случае ![]() и
и ![]() изменяются
на протяжении всего интервала наблюдения, но обычно для упрощения структуры
обнаружителя интервал наблюдения выбирают так, чтобы изменение параметра
изменяются
на протяжении всего интервала наблюдения, но обычно для упрощения структуры
обнаружителя интервал наблюдения выбирают так, чтобы изменение параметра ![]() было несущественным.
было несущественным.
Считают, что интервал наблюдения совпадает с длительностью пачки.
Это обработка внутри одного периода
Многопериодная обработка:
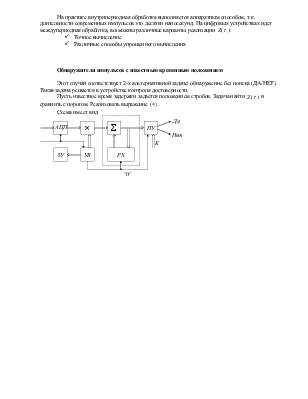
На практике внутрипериодная
обработка выполняется аппаратным способом, т.к. длительности современных
импульсов это десятки наносекунд. На цифровых устройствах идет междупериодная
обработка, возможны различные варианты реализации ![]() :
:
ü Точное вычисление
ü Различные способы упрощенного вычисления
Обнаружители импульсов с известным временным положением
Этот случай соответствует 2-х альтернативной задаче: обнаружение без поиска (ДА/НЕТ). Такая задача решается в устройстве контроля достоверности.
Пусть известное время задержки
задается положением стробов. Задача найти ![]() и сравнить
с порогом. Реализовать выражение
и сравнить
с порогом. Реализовать выражение ![]() .
.
Схема имеет вид
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.