Министерство образования РФ
Владимирский Государственный Университет
«Система слежения за временным положением импульса сигнала»
Выполнил: студент группы РФ-100
Принял:
Владимир 2003
Цель работы: экспериментальное исследование системы как представителя импульсных систем авторегулирования, ознакомление с методами анализа системы в целом и составляющих ее структурных звеньев.
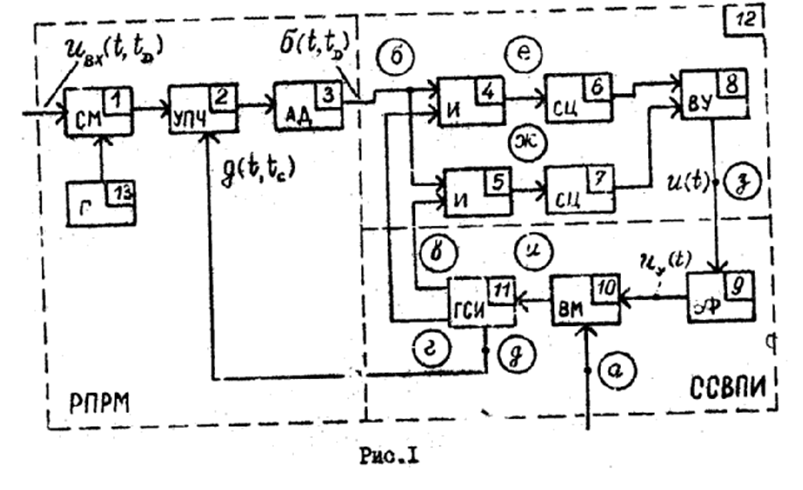
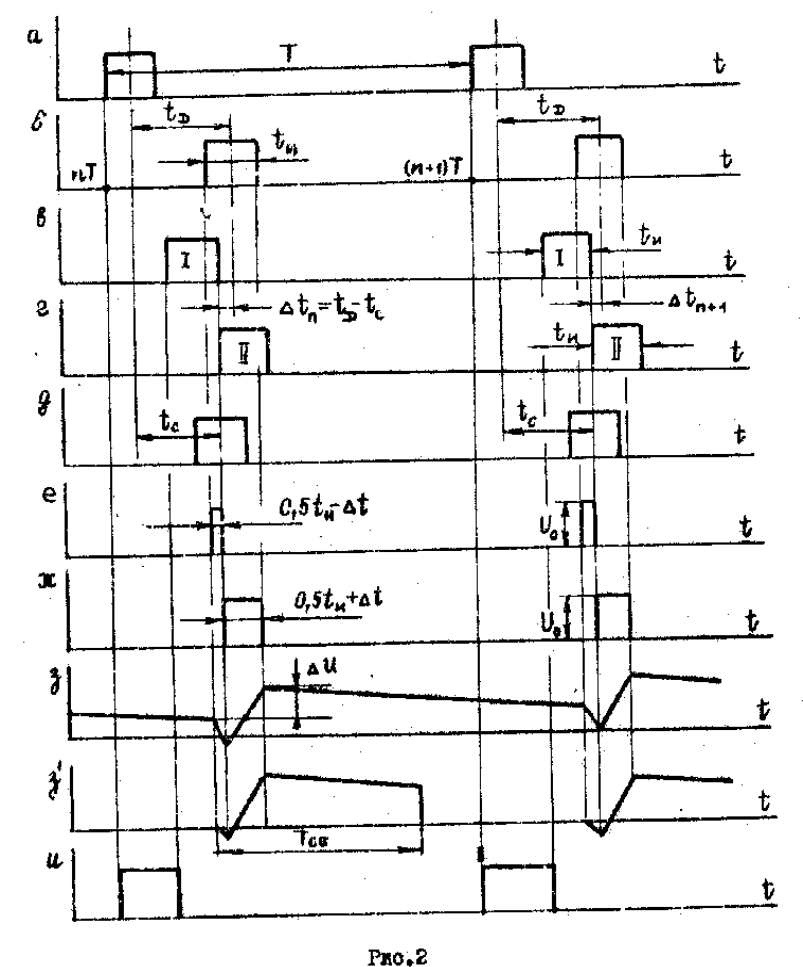
Применение ССВПИ для слежения за временным положением tD радиоимпульсов, поступающих на вход приемника (РПРМ) Uвх(t, tD), и принцип ее работы иллюстрируются Рис. 1. и Рис. 2., где 1 – смеситель (СМ), 2 – усилитель промежуточной частоты (УПЧ); 3 – амплитудный детектор (АД); 4, 5 – схемы совпадения (логические схема И); 6, 7 – сглаживающие цепи (СЦ); 8 – вычитающее устройство (ВУ); 9 – сглаживающий фильтр (СФ); 10 – временной модулятор (ВМ); 11 – генератор стробирующих и селекторного импульсов (ГСИ); 12 – временной дискриминатор (ВД); 13 – гетеродин (Г). Импульсы последовательности а задают опорные отсчеты времени, относительно которых определяется временное положение tD сигналов на входе Uвх(t, tD) и соответственно на выходе приемника σ(t, tD). Селекторный импульс g отпирает приемник. Выходной сигнал σ возникает только лишь при совпадении селекторного и входного импульсов (tD = tС). В течении остального времени на каждом периоде Т приемник закрыт, что характеризует его работу с избирательностью по времени. Назначение ССВПИ – поддерживать временное рассогласование между принятым и селекторным импульсами на нулевом уровне (Δt = tD – tС = 0) при возможных изменениях tD от периода к периоду. Такая задача решается, например, автоматической системой сопровождения цели по дальности (АСД) в импульсных РЛС.
УКВ, на которых работают РЛС, распространяются
прямолинейно. Импульсы а, наловившись в передатчике РЛС на несущее
колебание, излучаются антенной станции в направлении цели, находящейся на
расстоянии D от РЛС. Распространясь в пространстве со скоростью
света с в направлении цели и после отражения возвратившись в антенну,
радиосигналы преодолевают расстояние 2D за время tD. Величина tDизмеряется по
задержке импульсов на входе РПРМ Uвх(t, tD) по отношению к опорным импульсам а. Из
уравнения прямолинейного равномерного движения ![]() следует
формула времяимпульсного метода измерения дальности:
следует
формула времяимпульсного метода измерения дальности:

При высокой степени постоянства с время tD служит мерой дальности. Открывание системой ССВПИ приемника только на время, необходимое для приема сигнала от избранной цели при всех ее перемещениях по дальности, составляет режим сопровождения цели по дальности. Точность сопровождения характеризуется величиной ошибки Δt.
Функциональная и структурная схемы ССВПИ изображены на
Рис. 3. (соответственно):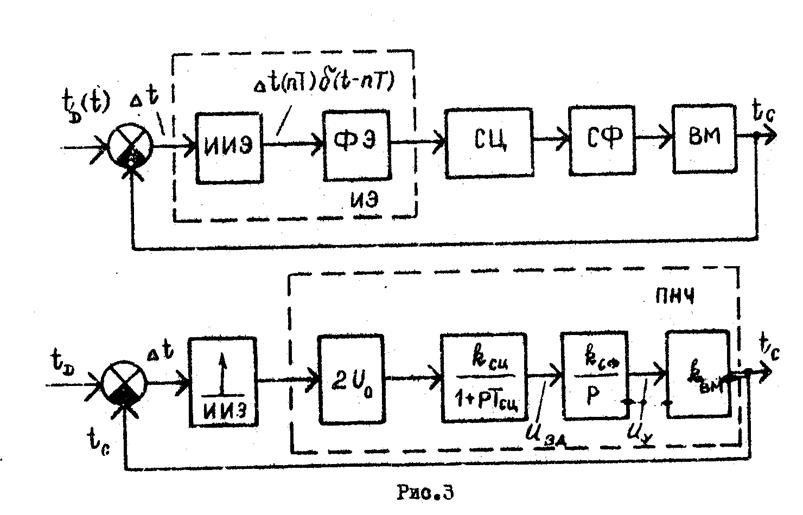
Задание на лабораторную работу.
Практическая часть.
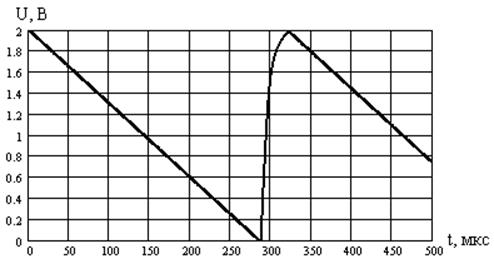
Осциллограмма сигнала с ГЛИН:
Выходной сигнал с компаратора и 1-ый стробирующий импульс:
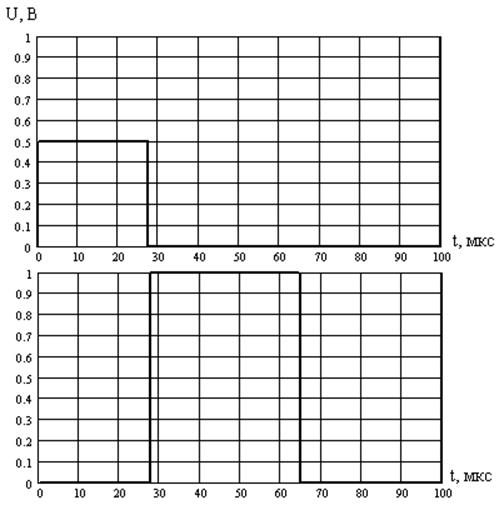
Как видно задний фронт выходного импульса компаратора запускает 1-ый стробирующий импульс, а задний фронт 1-ого стробирующего импульса запускает 2-ой стробирующий импульс.
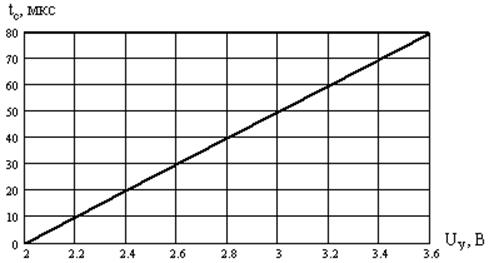
Регулировочная характеристика временного модулятора:
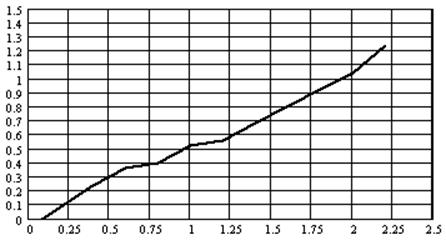
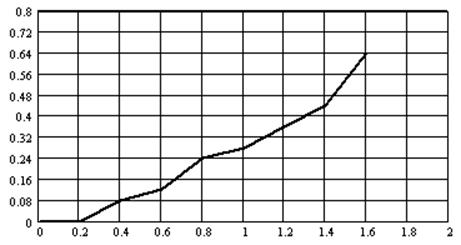
Переведем систему в режим слежения замыканием обратной связи.
Δtвх – изменение временного положения входного сигнала, Δtс – изменение положения селекторных импульсов.
· Без интегратора
|
Δt’вх |
0.08 |
0.4 |
0.6 |
0.8 |
1 |
1.2 |
1.4 |
1.6 |
1.8 |
2 |
|
Δt’с |
0.08 |
0.16 |
0.24 |
0.4 |
0.48 |
0.64 |
0.72 |
0.88 |
0.96 |
0.96 |
· С интегратором
|
Δtвх |
0 |
0.2 |
0.4 |
0.6 |
0.8 |
1 |
1.2 |
1.4 |
1.6 |
|
Δtс |
0 |
0.2 |
0.32 |
0.48 |
0.56 |
0.72 |
0.84 |
0.96 |
0.96 |
Переходная характеристика:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.