Министерство образования РФ.
Владимирский государственный университет.
Кафедра РТ и РС.
Курсовая работа.
Выполнил: студент гр. РБ-100
Проверил:
Владимир 2003.
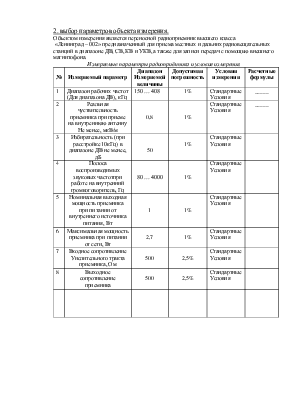
2. выбор параметров объекта измерения.
Объектом измерения является переносной радиоприемник высшего класса
«Ленинград – 002» предназначенный для приема местных и дальних радиовещательных станций в диапазоне ДВ, СВ, КВ и УКВ, а также для записи передач с помощью внешнего магнитофона.
Измеряемые параметры радиоприёмника и условия измерения.
|
№ |
Измеряемый параметр |
Диапазон Измеряемой величины |
Допустимая погрешность |
Условия измерения |
Расчетные формулы |
|
1 |
Диапазон рабочих частот (Для диапазона ДВ), кГц |
150 … 408 |
1% |
Стандартные Условия |
_____ |
|
2 |
Реальная чуствительность приемника при приеме на внутреннюю антенну Не менее, мкВ/м |
0,8 |
1% |
Стандартные Условия |
_____ |
|
3 |
Избирательность (при расстройке 10кГц) в диапазоне ДВ не менее, дБ |
50 |
1% |
Стандартные Условия |
|
|
4 |
Полоса воспроизводимых звуковых частотпри работе на внутренний громкоговоритель, Гц |
80 … 4000 |
1% |
Стандартные Условия |
|
|
5 |
Номинальная выходная мощность приемника при питании от внутреннего источника питания, Вт |
1 |
1% |
Стандартные Условия |
|
|
6 |
Максимальная мощность приемника при питании от сети, Вт |
2,7 |
1% |
Стандартные Условия |
|
|
7 |
Входное сопротивление Уислительного тракта приемника, Ом |
500 |
2,5% |
Стандартные Условия |
|
|
8 |
Выходное сопротивление приемника |
500 |
2,5% |
Стандартные Условия |
|
Требования к системе.
Система должна обеспечить:
А) обеспечить измерение всех параметров объекта измерения с необходимой точностью
Б) производить математическую и логическую обработку информации
В) иметь высокие эксплуатационные характеристики.
Г) обеспечить максимальную простоту обслуживания.
3. Приборно-модульные системы
выбор приборов измерения.
Для проведения измерения параметров радиоприемника необходимы следующие измерительные приборы:
Для автоматизации измерения необходимо чтобы эти приборы обладали совместимостью с одним из распространеных интерфейсов ( в нашем случае это будет интерфейс КОП). поэтому для организации и управления системой нам нужен контроллер КОП, выполняющий все измерительные и организационные операции. В качестве процессора будет выступать ПЭВМ с адаптером КОП и набором програмного обеспечения для работы с интерфейсом.
Методика измерения.
4. определение интерфейсных функций и структура адресов.
Определение интерфейсных функций.
5. состав базового и системного ПО, интерфейс оператора.
Базовое ПО.
Базовым ПО будем считать программы, или подпрограммы неодходимые для работы КОП. Необходимыми являются следующие модули:
А) модуль инициализации системы КОП. он должен выполняться перед началом работы с КОП. этот модуль проверяет работоспособность интерфейсной платы ПЭВМ, возможности записи в порты КОП и обнуление интерфейса.
Б) модуль передачи информации по КОП на устройство с требуемым адресом.
В) модуль передачи информации в безадресном режиме.
Г) модуль считывания инфомации из устройств с требуемым адресом.
Д) модуль установки ДУ в устройствах с требуемым адресом.
Е) модуль передачи однобайтной команды.
Ж) модуль приостановки выполнения пользовательской команды до появления сигнала ЗО.
З) модуль обеспечения реакции на сигнал ЗО. Предполагается что после выполнения любой другой п/программы, идет опрос линии ЗО с последующей идентификацией устройства, запросисившего обслуживание.
И) модуль отмены реакции на сигнал ЗО. После этой п/программы линия ЗО опрашиваться не будет.
Системное ПО.
Системным ПО будет считаться программы, которые управляют всеми ресурсами компьютера, и представляют пользователю интерфейсную оболочку, т. е. это тоже самое, что и ДОС. Если ПЫВМ является IBM- совместимой то системным ПО для нее будет MS-DOS, различные варианты WINDOWS. Будем пологать что ПЭВМ старая и в качестве системного ПО будет MS-DOS.
Интерфейс пользователя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.