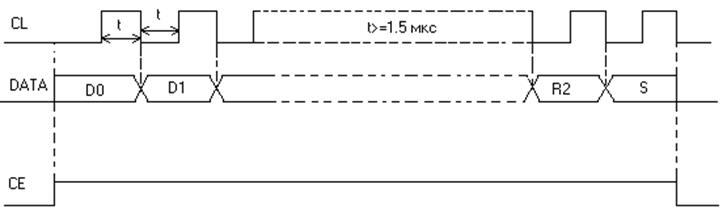
Выходной сигнал генератора, управляемого напряжением (ГУН), поступает на вход FMIN . Делители частоты уменьшают частоту сигналов образцового генератора и входного сигнала в необходимое число раз – до значения частотного шага сетки. Фазовый детектор сравнивает оба сигнала и формирует сигнал ошибки, уровень которого пропорционален разности фаз между ними. Сигнал ошибки снимают с вывода Pd1, который соединяется с элементом управления ГУНа. Генератор образован усилителем с ПОС задающим элементом которого является кварцевый резонатор. Программирующее слово передаётся в сдвиговый регистр по 3х проводной шине. Следует заметить, что слово передаётся последовательно по линии DATA, по линии CL передаются тактовые импульсы, запись в регистр производится по срезу импульса (по заднему фронту), линия СЕ – выступает, как линия разрешения записи
Микросхема может работать с семью стандартными значениями шага – 1, 5, 9, 10, 25, 50, 100 кГц (при частоте образцового генератора 7200 кГц). Управляющая последовательность битов и основные временные параметры приведены на рис.4.4. Введение информации происходит последовательно начиная с младшего бита коэффициента деления частоты программируемого делителя.
В режиме FM для программируемого делителя частоты используют биты D0 – D13 максимальное значение коэффициента деления равно 3FFF (HEX) или 1638310. В нашем примере при шаге сетки равным 10кГц и при длине диапазона в 0.89 МГц имеем 90 различных коэффициентов деления. Поскольку частота входного сигнала должна изменяться в пределах от 16265 кГц до 17155 кГц, то коэффициент деления для начала диапазона равен 16265/10=162610, т.е. в двоичном коде это будет следующая последовательность: 110010101002, соответственно для конца диапазона 17155/10=176010=110111000002.
|
D0 |
D1 |
D2 |
D3 |
D4 |
D5 |
D6 |
D7 |
D8 |
D9 |
D10 |
D11 |
|
D12 |
D13 |
T0 |
T1 |
B0 |
B1 |
B2 |
TB |
R0 |
R1 |
R2 |
S |
Здесь биты T0, T1, B0..B2, TB, R0..R2, S – биты управления. В нашем случае необходим только бит S – устанавливается в 1 т.е. выбирается FM диапазон. Более подробное описание приведено в [9].
Как уже было сказано, управление ИМС СЧ удобно осуществлять при помощи микропроцессора (микроконтроллера), применение которого поможет уменьшить габариты, количество ИМС в схеме, возможность модернизации, т.е. введение дополнительных функций в устройство без существенного изменения схемы, например индикация рабочей частоты или канала, осуществление сканирования и т.д. Микроконтроллер – ИМС которая управляется программно, т.е. обладает определенной «гибкостью». Существует много различных микроконтроллеров как зарубежного, так и отечественного производства. Из отечественных ИМС микропроцессоров широкодоступны такие, как К580, МК51, К18XX и т.п. Из зарубежных микроконтроллеров широко известны ИМС таких фирм как “Motorola” ИМС серий 6800, 68Н05, “Ziloc” ИМС серий Z80, Z40,”ATMEL” ИМС серий АТ-90, АТ89, а также фирмы “Microchip” ИМС серий PIC 12, PIC 14, PIC 16, PIC 17, PIC 18, и т.п. и многие другие.
Проведя анализ различных семейств микроконтроллеров я сделал выбор в сторону широко распространённого микроконтроллера фирмы “Microchip” типа PIC-16F84, свой выбор я обосновываю следующим:
1. выбранный контроллер имеет такую систему программирования, которая содержит всего 35 команд, против 100 команд К-580, 6800, 68Н05, хотя последние имеют более гибкие команды, чем PIC-16F84, но в нашем случае такие “гибкие” команды необязательны.
2. выбранный элемент достаточно распространён и его стоимость не превышает 3 – 4 долларов США, а например контроллеры фирмы ATMEL имеют стоимость порядка 8 – 10 долларов США, имея при этом более широкие возможности, которые в проектируемом устройстве являются избыточными.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.