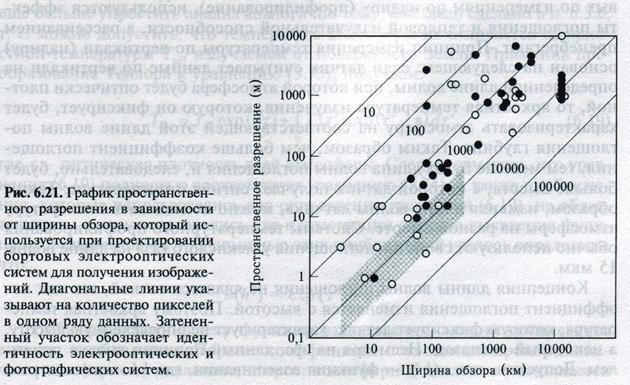
На рис. 6.21 представлен график пространственного разрешения бортовых систем в зависимости от ширины обзора. Применяя этот график, разработники чаще всего выбирают изображение с количеством пикселей от 1000 до 10000. Для сравнения, в фотографических системах обычно используют изображения с количеством пикселей от 3000 до 30 000. Следовательно, изображения электрооптических систем занимают на несколько мегабайт памяти меньше, чем изображения фотографических систем.
|
|
|
|
6.5. Атмосферное зондирование
Рассмотренные выше системы предназначены для получения изображений поверхности Земли (или поверхности облаков). Поэтому диапазоны, в которых функционируют эти системы, выбираются так, чтобы они соответствовали атмосферным «окнам» (см. гл. 4). Однако если выбрать такой рабочий диапазон, при котором атмосферное влияние будет значительным, то можно получить информацию о составе самой атмосферы. Такой информацией может быть изменение температуры с изменением высоты, изменение плотности атмосферных газов или аэрозолей с изменением высоты. Наиболее важными являются данные по кислороду в атмосфере, так как он — хороший индикатор атмосферного давления, и по парам воды, которые вносят основные искажения при измерениях в тепловом инфракрасном диапазоне. Но и другие составляющие атмосферы являются предметом изучения, например озон или радиоактивные молекулы.
Техника атмосферного зондирования построена на трех физических явлениях (которые были описаны в п. 3.4.1): это поглощение, рассеивание и тепловая излучательная способность.
6.5.1. Определение температурных кривых при измерениях по надиру
В системах, которые применяются для получения температурных кривых по измерениям по надиру (профилирование), используются эффекты поглощения и тепловой излучательной способности, а рассеиванием пренебрегают. Принцип измерения температуры по вертикали (надиру) основан на следующем: если датчик считывает данные по вертикали на определенной длине волны, при которой атмосфера будет оптически плотной, то яркостная температура излучения, которую он фиксирует, будет характеризовать атмосферу на соответствующей этой длине волны поглощения глубине. Таким образом, чем больше коэффициент поглощения, тем меньше будет длина волны поглощения и, следовательно, будет больше высота, с которой датчик получает сигнал о температуре. Таким образом, изменяя длину волны датчика, можно исследовать температуру атмосферы на разной высоте. Системы температурного профилирования обычно используют свойство поглощения углекислого газа на длине волны 15 мкм.
Концепция длины волны поглощения не является точной, так как коэффициент поглощения изменяется с высотой. Поэтому яркостная температура, которую фиксирует датчик, характеризует не определенную высоту, а некоторый диапазон. Несмотря на это, данный принцип вполне приемлем. Допустим, что ______ — функция взвешивания, где h' — высота слоя атмосферы. Тогда яркостная температура на высоте h будет определяться следующим образом:

Задачей является определение вида функции ________.
Так как при вертикальном измерении температуры имеют значение только поглощение и излучательная способность, то упрощенной формой уравнения (3.71) является:
Как было показано в п. 3.4.1, решением этого уравнения будет формула:

где _______ и __________— оптическая плотность, соответствующая точкам в атмосфере относительно поверхности Земли. Преобразуем уравнение (6.16) в термины оптической плотности:

где ![]() соответствует высоте h' по
формуле:
соответствует высоте h' по
формуле:

Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.