2)
дополнительная погрешность установки частоты Г3-26: обусловлена нестабильностью
частоты (случайная, инструментальная): ![]() %[°]
%[°]
3) основная погрешность измерения ваттметра М3-90 (систематическая, инструментальная):
Для плоскости вектора Е: пусть в максимуме диаграммы направленности в плоскости вектора Е уровень мощности равен 5мВт, тогда:
 [Bт] .
[Bт] .
Для плоскости вектора Н: пусть в максимуме диаграммы направленности в плоскости вектора Н уровень мощности равен 12мкВт, тогда:
 [Bт]
[Bт]
Данная погрешность
имеет размеренность мощности, нам же необходимо иметь размеренность угла ![]() . Эта погрешность будет влиять на точность
определения уровня половинной мощности так, как показано на рисунке 2:
. Эта погрешность будет влиять на точность
определения уровня половинной мощности так, как показано на рисунке 2:
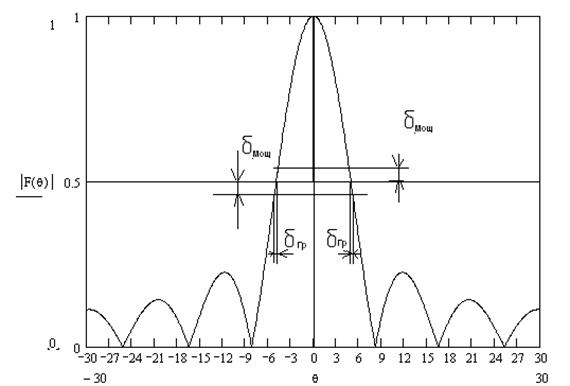
Рассмотрим нормированную диаграмму направленности: у нас уровень 0.5 по мощности определяется с погрешностью 4.2% (плоскость Е) и 4.8% (плоскость Н).Это составит 0.5± 0.02 в плоскости Е ( 0.5±0.03 для плоскости Н). Для уровня 0.52 ширина диаграммы в плоскости Е составит 9.68°.то есть диаграмма сузиться на 0.24° ( 1° в плоскости Н). Тогда
 [°] – в плоскости Е
[°] – в плоскости Е
 [°] –
в плоскости Н
[°] –
в плоскости Н
4) дополнительная погрешность М3-90, обусловлена изменениями напряжения питания и внешней температуры в ходе измерений (случайная, инструментальная)
Для плоскости вектора Е: ![]() [°]
[°]
Для плоскости вектора Н: ![]() [°]
[°]
Суммирование погрешностей:
Для измерения мощности, принимаемой антенной в плоскости вектора Е:
Систематическая погрешность измерения: ![]()
Случайная погрешность измерения:
![]()
Для измерения мощности, принимаемой антенной в плоскости вектора Н:
Систематическая погрешность измерения: ![]()
Случайная погрешность измерения:
![]()
Погрешность косвенных измерений:
Расчетная формула имеет вид
Так как расчет ведется в относительном масштабе, то константу 34000 учитывать не нужно
![]() =9.9° ,
=9.9° , ![]() =89.2°
=89.2°
Тогда случайная погрешность косвенных измерений будет определяться
Систематическая погрешность косвенных измерений:
То есть, выполняется условие ![]() , следовательно итоговая погрешность составит
, следовательно итоговая погрешность составит
![]() =0.8(0.25+1.6*0.13)=0.37%
=0.8(0.25+1.6*0.13)=0.37%
5) Структура адресов и интерфейсные функции
Структура адресов
Зададим следующие адреса для приборов.
|
Прибор |
Адрес на прием |
Адрес на передачу |
|
Ваттметр М3-90 |
20h 010000 |
40h 100000 |
|
Измеритель КСВ Р2-115 |
21h 010001 |
41h 100001 |
|
Синтезатор частоты Р46-03 |
22h 010010 |
42h 100010 |
Определение интерфейсных функций
Рассмотрим состав необходимых интерфейсных функций: приборы должны обладать функцией запуска (чтобы запускать приборы на измерение), уметь правильно передавать и принимать данные, иметь функцию сброса (чтобы можно было переинициализировать систему) и дистанционного управления. Таким образом приборы должны иметь следующие интерфейсные функции:
1) ЗП – запуск прибора, позволяет начать выполнение основной работы (измерений) либо одному прибору, либо группе устройств
2) ДМ – дистанционное\местное, позволяет делать выбор между входной информацией интерфейса и органами управления с передней панели
3) П- приемник, необходим для обеспечения получения данных.
4) СП- синхронизация приема, обеспечивает правильное получение устройством дистанционных многолинейных сообщений.
5) И- источник, позволяет “говорящему” прибору передавать через интерфейс формируемые им данные другим приборам.
6) СИ- синхронизация передачи источника, обеспечивает правильную передачу устройством многолинейных сообщений.
7) СБ- очистка устройства, приводит прибор в исходное состояние.
8) ЗП- запуск прибора, позволяет начать выполнение основной работы (измерения), либо одному либо группе приборов.
6. Состав базового и системного ПО:
Программные средства, необходимые для работы системы с шиной КОП можно разделить на базовое ПО и системное ПО.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.