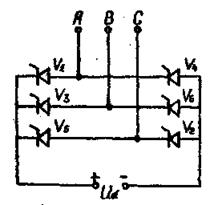
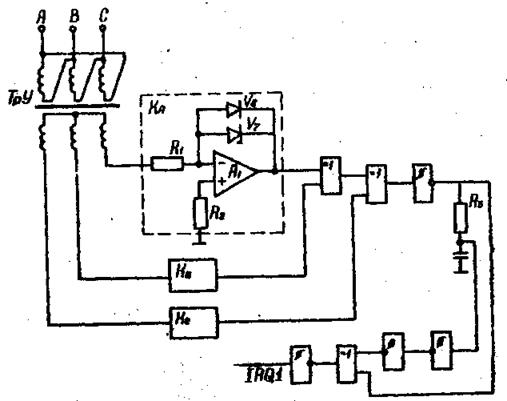
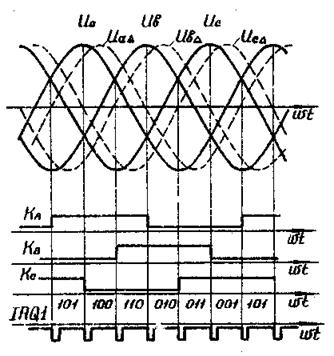
Управление углом отпирания ВП предусматривает три основные операции: линейную синхронизацию с питающей сетью, задержку угла отпирания и распределение импульсов. В микропроцессорных системах эта операции могут быть реализованы различными способами: только аппаратными или программными средствами, комбинацией аппаратных и программных средств. Каждый способ имеет свои преимущества и недостатки. Однако третий способ позволяет наилучшим образом использовать аппаратно-программные средства микропроцессорной системы управления ВП. Принцип построения микропроцессорной системы прямого цифрового управления ВП рассматривается на примере мостовой схемы выпрямления, приведенной на рис.2.5. Основная функция микропроцессорной системы управления ВП - преобразование входного управляющего сигнала в соответствующий фазовый сдвиг между отпирающими импульсами и напряжением источника переменного тока. При этом управление должно быть засинхронизировано с переменным напряжением этого источника, то есть с напряжением питающей сети. Синхронизация может выполняться один раз за период питающего напряжения или же шесть раз за период, через 1/6 часть периода сети. Второй вариант обеспечивает большее быстродействие системы управления. Реализация схемы синхронизации основана на возможности микропроцессора работать в режиме прерывания и заключается в обнаружении времени пересечения кривой питающего напряжения оси абсцисс и выработки в этот момент сигналов прерывания для вызова необходимых обслуживающих программ. Принципиальная схема узла синхронизации приведена на рис.2.6, а временные диаграммы его работы - на рис.2.7.
|
|
|
Рис.2.5. Силовая схема |
Схема синхронизации (линейный интерфейс) представляет
собой устройство на основе трансформатора управления ![]() ,
первичные обмотки которого соединены в треугольник (что обеспечивает сдвиг
начала синусоид вторичного напряжения трансформатора в точки естественного
включения вентилей ВП). Ко вторичным обмоткам трансформатора подключены
компараторы
,
первичные обмотки которого соединены в треугольник (что обеспечивает сдвиг
начала синусоид вторичного напряжения трансформатора в точки естественного
включения вентилей ВП). Ко вторичным обмоткам трансформатора подключены
компараторы ![]() ,
, ![]() ,
, ![]() , формирующие импульсы, отражающие
проводимость вентилей каждой фазы. Выходы компараторов через две микросхемы
«исключающее ИЛИ» подключены к формирователю узких импульсов прерывания
, формирующие импульсы, отражающие
проводимость вентилей каждой фазы. Выходы компараторов через две микросхемы
«исключающее ИЛИ» подключены к формирователю узких импульсов прерывания ![]() , следующих через 60°, построенному на
базе триггеров Шмитта. Следует указать, что выходные сигналы компараторов
могут служить информацией для распределения импульсов отпирания по вентилям,
так как однозначно указывают состояние сети в любой момент времени.
, следующих через 60°, построенному на
базе триггеров Шмитта. Следует указать, что выходные сигналы компараторов
могут служить информацией для распределения импульсов отпирания по вентилям,
так как однозначно указывают состояние сети в любой момент времени.
|
|
|
Рис.2.6. Принципиальная схема устройства синхронизации |
В цифровом варианте принцип работы устройства задержки
может быть реализован программируемым таймером, работающим под контролем
микропроцессора. В качестве таймера может использоваться большая интегральная
схема (БИС) типа КР580ВИ53, работающая в режиме ![]() .
.
Каждую шестую часть периода сети при приеме сигнала
прерывания ![]() микропроцессор запускает таймер
управляющим словом задержи, которое заносится в счетчик. Под действием тактовых
импульсов, поступающих от тактового генератора стабильной частоты, начинает
уменьшаться содержимое счетчика. При достижении содержимым счетчика нулевого
значения таймер вырабатывает сигнал управления вентилями. Синхронизированное
линейным интерфейсом, каждые 60° цифровое устройство задержки; в соответствии с
управляющим словом задержки вырабатывает сигнал управления вентилями, значение
которого лежит в диапазоне от 0° до 60°. Если действительный угол управления
больше 60° , то микропроцессор, перед тем как осуществлять распределение
импульсов, обеспечивает сдвиг управляющего сигнала на 60° или 120° в
зависимости от сигнала управления на входе цифровой СИФУ.
микропроцессор запускает таймер
управляющим словом задержи, которое заносится в счетчик. Под действием тактовых
импульсов, поступающих от тактового генератора стабильной частоты, начинает
уменьшаться содержимое счетчика. При достижении содержимым счетчика нулевого
значения таймер вырабатывает сигнал управления вентилями. Синхронизированное
линейным интерфейсом, каждые 60° цифровое устройство задержки; в соответствии с
управляющим словом задержки вырабатывает сигнал управления вентилями, значение
которого лежит в диапазоне от 0° до 60°. Если действительный угол управления
больше 60° , то микропроцессор, перед тем как осуществлять распределение
импульсов, обеспечивает сдвиг управляющего сигнала на 60° или 120° в
зависимости от сигнала управления на входе цифровой СИФУ.
|
|
|
Рис.2.7. Временные диаграммы устройства синхронизации |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.