1) Структурная схема следящей системы и преобразованная структурная схема:
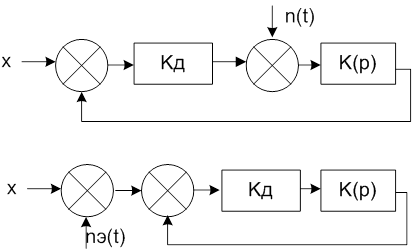
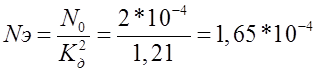
Где Кд – коэффициент передачи дискриминатора, В/Гц; К(р) – передаточная функция фильтра. Вторая схема получается из первой по правилу переноса сумматора с выхода на вход звена при преобразовании спектральной плотности шума: Nэ=No/Кд2, где [No]=Вт/Гц.
Передаточная функция разомкнутой цепи:

Передаточная функция замкнутой цепи:

Спектральная плотность эквивалентных флуктуаций, приведенных ко входу дискриминатора:
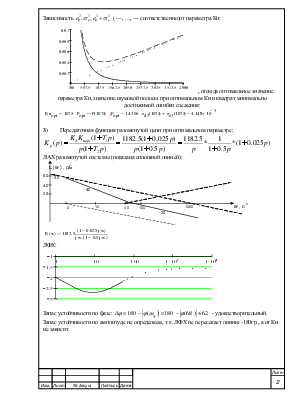
2) Задача – оптимизировать систему по параметру Ки, т.е. найти такой параметр Ки, при котором достигается минимум величины:
![]()
при заданной структуре.
Динамическая ошибка, обусловленная инерционностью следящей системы по отношению к меняющемуся задающему воздействию(порядок астатизма системы равен единице):
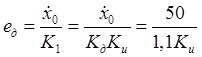 ,
,  .
.
Дисперсия шумовой ошибки, обусловленная помехой n(t):
![]() ,
,
где  - шумовая полоса следящей системы,
- шумовая полоса следящей системы, ![]() - АЧХ замкнутой системы.
- АЧХ замкнутой системы.
 ,
,  ,
, ![]()
Зависимость ![]() ( ___, …,
--- соответственно)от параметра Ки:
( ___, …,
--- соответственно)от параметра Ки:
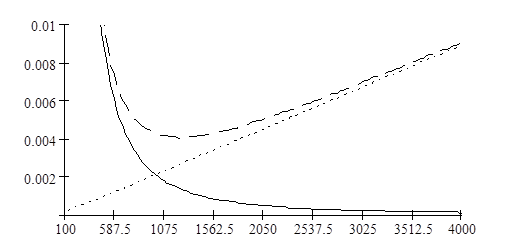 , отсюда оптимальное значение параметра
Ки, значение шумовой полосы при оптимальном Ки и квадрат минимально достижимой
ошибки слежения:
, отсюда оптимальное значение параметра
Ки, значение шумовой полосы при оптимальном Ки и квадрат минимально достижимой
ошибки слежения:
![]()
3) Передаточная функция разомкнутой цепи при оптимальном параметре:

ЛАХ разомкнутой системы (показана сплошной линией):
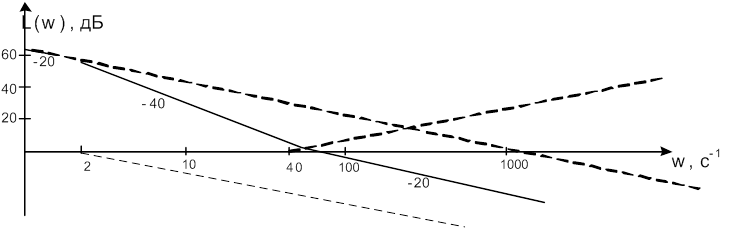
ЛФХ:
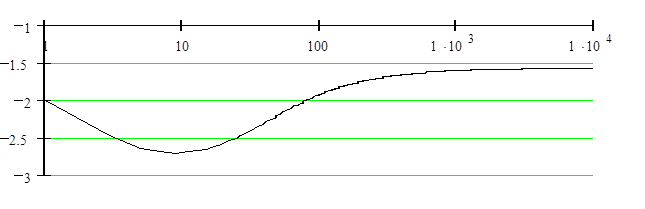
Запас устойчивости по фазе: ![]() -
удовлетворительный. Запас устойчивости по амплитуде не определяем, т.к. ЛФХ не
пересекает линию -180гр., а от Ки не зависит.
-
удовлетворительный. Запас устойчивости по амплитуде не определяем, т.к. ЛФХ не
пересекает линию -180гр., а от Ки не зависит.
4) Моделирование следящей
системы на ЭВМ. Дискретная передаточная функция цифровой модели следящей
системы получается из передаточной функции замкнутой непрерывной системы Кз(р)
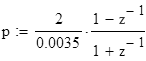
путем замены оператора непрерывного интегрирования 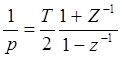 , где
Т – интервал дискретизации, выбираемый из условия: T<1/2Fш. Т=1/(2*14,306)=0,0035.
, где
Т – интервал дискретизации, выбираемый из условия: T<1/2Fш. Т=1/(2*14,306)=0,0035.

при подстановке
 для Ке(z)
получим:
для Ке(z)
получим: 

Разделим числитель и знаменатель на z2 и после преобразования получим:
 ,
, 
Отсюда:

![]()
Разностное уравнение
запишется в виде: ![]()
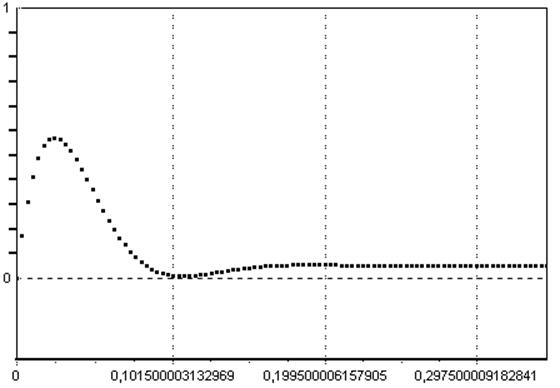
При единичном воздействии х[k]=1 при к>-1
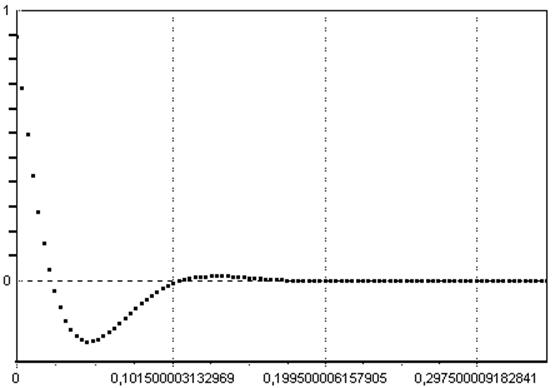
по оси абсцисс – К*Т (с), по оси ординат – значение е(к). Перерегулирование emax=-0,224=22%, быстродействие (по уровню |е(к)|<0.01) ≈0.161 с.
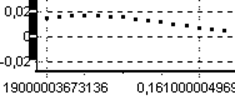
при линейном воздействии: x[k]=kTx’0=k*0.0035*50
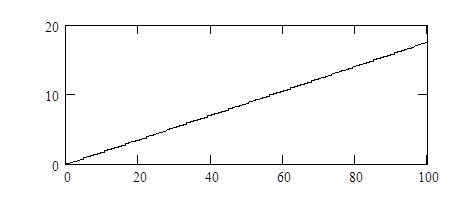
установившаяся ошибка ≈0,047.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.