 |
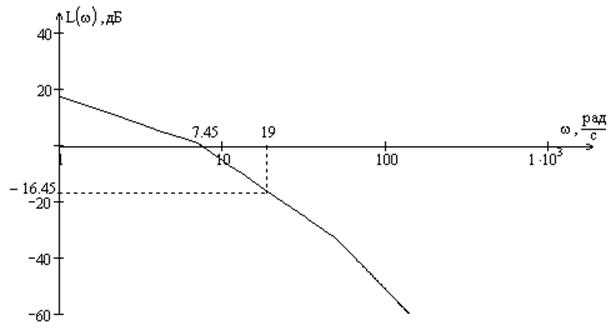
Рис.6 ЛАХ разомкнутой системы
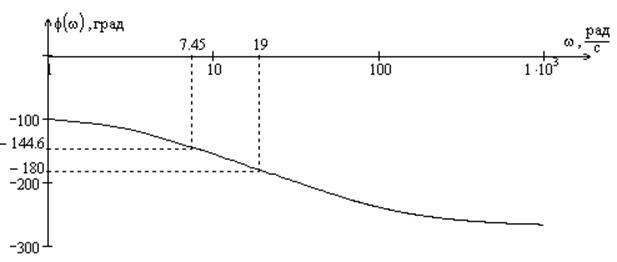 |
Рис.7 ЛФХ разомкнутой системы при Ku = 15
Запасы устойчивости теперь: ΔL = 16.452, Δφ = 35.320
Условие устойчивости выполняется.
В результате изменения Ku новые значения шумовой полосы и ошибки слежения будут:
Fш = 0,626, emin = 0,237
5. Моделирование следящей системы
 |
|||
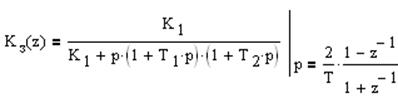
Моделирование проведём методом билинейного преобразования: непрерывные интегрирующие звенья заменяются дискретными интеграторами, осуществляющими интегрирование по методу трапеций. Дискретная передаточная функция цифровой модели следящей системы при использовании метода билинейного преобразования получается из передаточной функции замкнутой непрерывной системы путём замены оператора непрерывного интегрирования:
 |
|||
 |
|||
 |
|||
 |
|||
 |
 |
|||
 |
 |
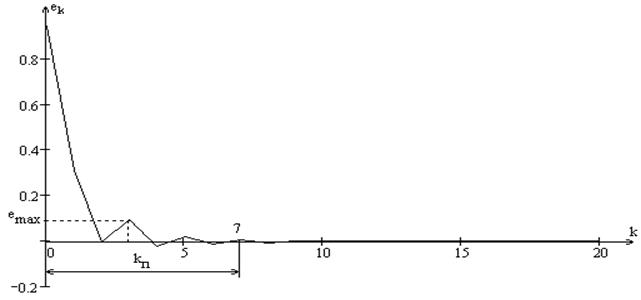
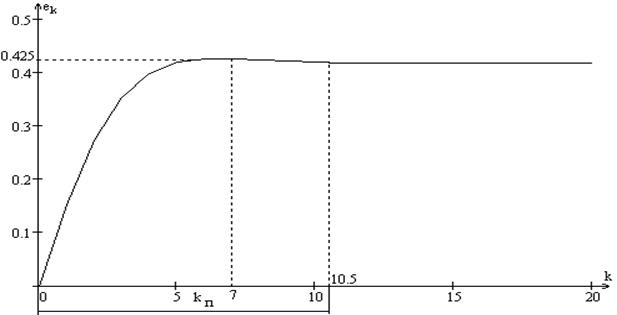
Оценим характеристики переходного процесса - быстродействие переходного процесса (время, в течение которого ошибка уменьшается по абсолютной величине до значения 0,01) и перерегулирование (величину максимального выброса в переходной характеристике).
- быстродействие переходного процесса tп = kп·Т = 1,12с
-
 |
 |
- быстродействие переходного процесса tп = kп·Т = 1,68с
- перерегулирование еmax = 0,0075
6. Функциональная схема следящей системы
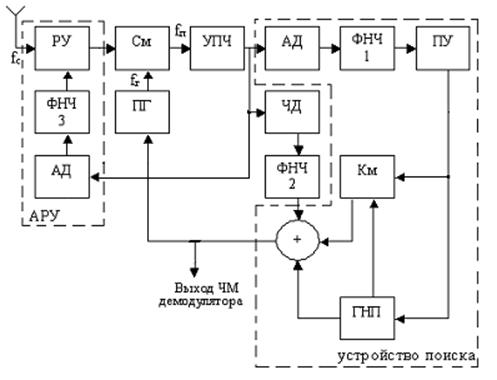 |
Обозначения, используемые в схеме:
РУ – усилитель верхней частоты с регулируемым коэффициентом усиления
См – смеситель
УПЧ – усилитель промежуточной частоты
АД – амплитудный детектор
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.