








Материалы лекции № 2.3.
Испытания на действие ускорений и невесомости.
*****
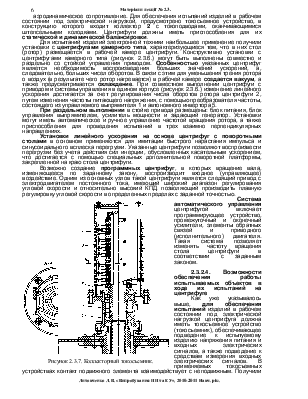
Виды ускорений, возможности их проявления и воспроизведения в условиях испытаний. Оборудование для проведения испытаний на воздействие линейных ускорений (Классификация центрифуг. Основными параметрами, характеризующие центрифуги. Основные типы центрифуг. Возможности обеспечения работы испытываемых объектов в ходе их испытаний на центрифуге.). Средства измерения линейных ускорений. Приборы для измерения частоты вращения. Методы испытаний на воздействие линейного ускорения. Испытания на воздействие невесомости (Невесомость и отказы технических устройств. Имитация условий воздействия динамической невесомости. Испытания по выявлению воздействия невесомости на функционирование технических систем и их компонентов.).
*****
2.3.1.Виды ускорений, возможности их проявления и воспроизведения в условиях испытаний.
 При движении наземных
транспортных средств, в летательных аппаратах, во вращающихся деталях механизмов,
в ракетах и снарядах, во всех движущихся объектах возникают линейные и
угловые ускорения. Ускорения могут возникать при прямолинейном,
криволинейном и вращательном движениях. Воспроизведение ускорений в
процессе испытаний достигается, в основном, с помощью вращательного движения, создаваемого
центрифугами. Криволинейное и вращательное движения могут быть равномерными и с
ускорением. При равномерном криволинейном движении точки по окружности
она проходит путь по дуге равный ΔS, или поворачивается на угол Δφ =
ΔS/R, где R радиус окружности, по которой движется точка
При движении наземных
транспортных средств, в летательных аппаратах, во вращающихся деталях механизмов,
в ракетах и снарядах, во всех движущихся объектах возникают линейные и
угловые ускорения. Ускорения могут возникать при прямолинейном,
криволинейном и вращательном движениях. Воспроизведение ускорений в
процессе испытаний достигается, в основном, с помощью вращательного движения, создаваемого
центрифугами. Криволинейное и вращательное движения могут быть равномерными и с
ускорением. При равномерном криволинейном движении точки по окружности
она проходит путь по дуге равный ΔS, или поворачивается на угол Δφ =
ΔS/R, где R радиус окружности, по которой движется точка
Можно показать, что возникающее при указанном перемещении точки приращение вектора скорости приводит к возникновению нормального (центростремительного) ускорения, вектор которого направлен к центру окружности, а модуль определяется формулой
![]() (2.3.1.)
(2.3.1.)
Очевидно, что чем больше искривлена траектория
движения, т. е. чем меньше R, тем больше an
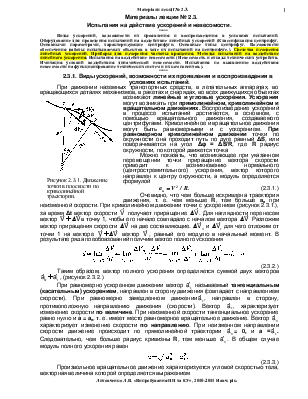
при неизменной скорости. При криволинейном движении точки с ускорением (рисунок
2.3.1.), за время Δt
вектор скорости ![]() получает приращение
получает приращение ![]() . Для наглядности перенесем вектор
. Для наглядности перенесем вектор ![]() в точку 1, чтобы его начало совпадало с началом
вектора
в точку 1, чтобы его начало совпадало с началом
вектора ![]() Разложим вектор приращения скорости
Разложим вектор приращения скорости ![]() на две составляющие.
на две составляющие. ![]() и
и ![]() для
чего отложим от точки 1 на векторе
для
чего отложим от точки 1 на векторе ![]() вектор
вектор ![]() , равный его модулю в начальный момент. В
результате ряда преобразований получим вектор полного ускорения
, равный его модулю в начальный момент. В
результате ряда преобразований получим вектор полного ускорения
 (2.3.2.)
(2.3.2.)
Таким образом, вектор полного ускорения определяется
суммой двух векторов ![]() , (рисунок 2.3.2.).
, (рисунок 2.3.2.).
При
равномерно ускоренном движении вектор ![]() называемый
тангенциальным (касательным) ускорением, направлен в сторону движения
(совпадает с направлением скорости). При равномерно замедленном движении
называемый
тангенциальным (касательным) ускорением, направлен в сторону движения
(совпадает с направлением скорости). При равномерно замедленном движении![]() , направлен в сторону, противоположную направлению
движения (скорости). Вектор
, направлен в сторону, противоположную направлению
движения (скорости). Вектор ![]() , характеризует
изменение скорости по величине. При неизменной скорости тангенциальное
ускорение равно нулю и а=аn, т.
е. имеет место равномерное вращательное движение. Вектор
, характеризует
изменение скорости по величине. При неизменной скорости тангенциальное
ускорение равно нулю и а=аn, т.
е. имеет место равномерное вращательное движение. Вектор ![]() характеризует изменение скорости по
направлению. При неизменном направлении скорости движение происходит по
прямолинейной траектории
характеризует изменение скорости по
направлению. При неизменном направлении скорости движение происходит по
прямолинейной траектории ![]() = 0, и а =
= 0, и а =![]() . Следовательно, чем больше радиус
кривизны R, тем меньше
. Следовательно, чем больше радиус
кривизны R, тем меньше ![]() . В общем случае
модуль полного ускорения равен
. В общем случае
модуль полного ускорения равен
 (2.3.3.)
(2.3.3.)
Произвольное вращательное движение характеризуется угловой скоростью тела, векторная величина которой определяется выражением
 (2.3.4.)
(2.3.4.)
 где Δt-время, за которое совершается поворот на Δφ.
где Δt-время, за которое совершается поворот на Δφ.
При постоянной угловой скорости имеет место равномерное вращение, при котором ω = φt. Учитывая, что угловая скорость одного оборота ω = 2π/n, и выражая его числом оборотов n в одну минуту, получим ω = πn/30 Гц.
При неравномерном вращении изменение вектора угловой скорости со временем характеризуется величиной
 (2.3.5.)
(2.3.5.)
которая называется угловым ускорением. Модуль углового ускорения β=ω/T. При вращении отдельные точки вращающегося тела имеют различную касательную скорость Vτ, которая зависит от угловой скорости ω и от расстояния R данной точки от оси вращения. Полагая, что точка находится на расстоянии R от оси и проходит при вращении путь ΔS = RΔφ, получим линейную скорость
 (2.3.6.)
(2.3.6.)
Таим образом, чем дальше отстоит точка от оси вращения, тем с большей линейной скоростью она вращается. Как уже было показано, an = V2/Rи, следовательно, an = ω2/R.
Аналогично модуль тангенциального (касательного
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.