




влияния рассмотренным причин, ротор становится динамически неуравновешенным и вращается вокруг другой оси, не совпадающей с его главной центральной осью инерции, рисунок 1..
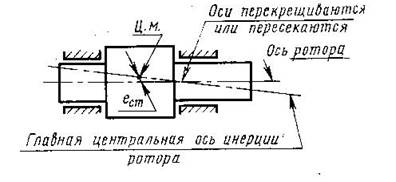
Рисунок 1. Динамическая неурановешенность ротора.
1. Верхнее значение главного вектора допустимых дисбалансов определяют по формулам:
для ротора, балансируемого в изделии в сборе
![]() (1)
(1)
для ротора, балансируемого в виде отдельной детали
![]() (2)
(2)
где mрот - масса ротора, состоящая из всех деталей, которые вращаются в собранном изделии как одно целое (например, собственно ротор, насаженные на него маховики, колеса вентиляторов, шкивы, шестерни, вращающиеся вместе с ротором кольца подшипников;
ест табл = eper= ezul- значение удельного дисбаланса, определяемое для данного собранного изделия по верхней границе установленного класса точности балансировки и максимальной эксплуатационной частоте вращения его ротора;
Dст т - значение главного вектора технологических дисбалансов изделия, ротор которого балансировался не в сборе;
Dст э - значение главного вектора эксплуатационных дисбалансов изделия.
Примечания:
1. Технологические дисбалансы возникают при сборе ротора, если он балансировался не в изделии в сборе, из-за монтажа на него деталей (шкивов, полумуфт, подшипников, вентиляторов и т.д.), которые имеют собственные дисбалансы, вследствие отклонения формы и расположения поверхностей и посадочных мест, радиальных зазоров и т.д.
2. Эксплуатационные дисбалансы возникают из-за неравномерности износа, релаксации, выжигания, кавитации деталей ротора (например, рабочих колес насосов, вентилятором, турбин), деформации деталей ротора под влиянием рабочей температуры ротора, неравномерности распределения материала на рабочей поверхности центрифуги, действия шатунных и поступательно движущихся масс в поршневых машинах, за заданный технический ресурс или до ремонта, предусматривающего балансировку.
2. Нижнее значение главного вектора допустимых дисбалансов, приложенного к центру масс ротора рассчитывают по формулам:
для ротора, балансируемого в изделии в сборе
 (5)
(5)
для ротора, балансируемого в виде отдельной детали или сборочной единицы
 (6)
(6)
3. Для двух опорных роторов верхние и нижние значения допустимых дисбалансов в каждой из двух плоскостей коррекции 1 и 2 следует определять по формулам:
 (7)
(7)
 (8)
(8)
 (9)
(9)
 (10)
(10)
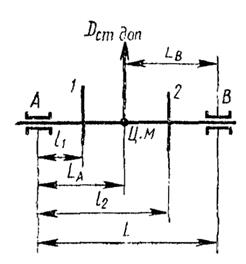
Черт. 2.
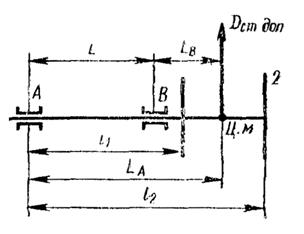
Рисунок 1.
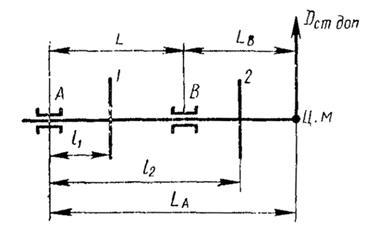
Рисунок 2.
Примечания:
1. Верхние и нижние значения допустимых дисбалансов в плоскости опор, измерения или приведения определяют по этим же формулам и черт. 2 - 4, подставляя вместо l1 и l2 расстояния от опоры А до соответствующих плоскостей.
2. При расчете необходимо учитывать, что наибольшие значения дисбалансов D1 доп верхн и D2 доп верхн являются предельными, независимо от направления иx действия, определяемого видами неуравновешенностей ротора (статической, моментной или динамической).
1.1. Краткий анализ служебного назначения ротора.
1.2. Регламентация класса точности роторов по ИСО 1940-1-2007, устанавливающего классы точности жестких роторов изделий космических аппаратов и изделий с учетом требований к балансировке и методам расчета дисбалансов.
1.3. Роторы изделий, отнесенных к G0,16 и G0,4 классам точности балансировки, следует балансировать в своих подшипниках в собственном корпусе при соблюдении всех условий эксплуатации с использованием собственного привода.
1.3.1. Классы точности G0,16; G0,4; G1 являются прецизионными
1.3.2. Роторы изделий, отнесенных к G1-классу точности балансировки, следует балансировать в собственных подшипниках или в собственном корпусе, со специальным приводом, если нет собственного привода.
1.3.3. Роторы изделий, отнесенных к G2,5–G630классам точности балансировки
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.