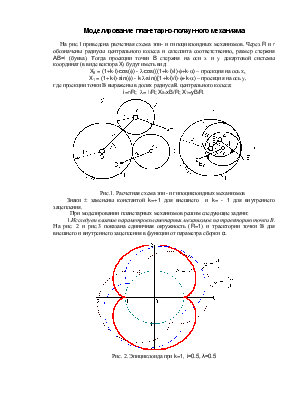
Моделирование планетарно-ползунного механизма
На рис.1 приведена расчетная схема эпи- и гипоциклоидных механизмов. Через R и r обозначены радиусы центрального колеса и сателлита соответственно, размер стержня АВ=l (буква). Тогда проекции точки В стержня на оси x и y декартовой системы координат (в виде вектора X) будут иметь вид:
X0 = (1+k×i)×cos(f) - l×cos(((1+k×i)/i)×f+k×a) – проекция на ось х,
X1 = (1+k×i)×sin(f) - k×l×sin(((1+k×i)/i)×f+k×a) – проекция на ось y, где проекции точки В выражены в долях радиуса R центрального колеса:
i=r/R; l= l/R; Х0=xB/R; Х1=yB/R.
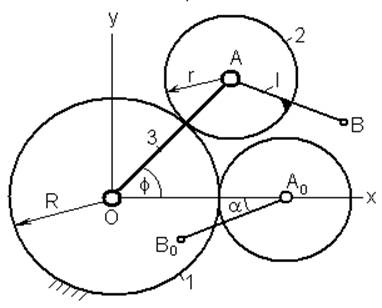
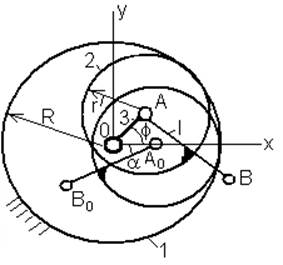
Рис.1. Расчетная схема эпи- и гипоциклоидных механизмов
Знаки ± заменены константой k=+1 для внешнего и k= - 1 для внутреннего зацепления.
При моделировании планетарных механизмов решим следующие задачи:
1.Исследуем влияние параметров планетарных механизмов на траекторию точки В. На рис. 2 и рис.3 показана единичная окружность (R=1) и траектории точки В для внешнего и внутреннего зацепления в функции от параметра сборки α.
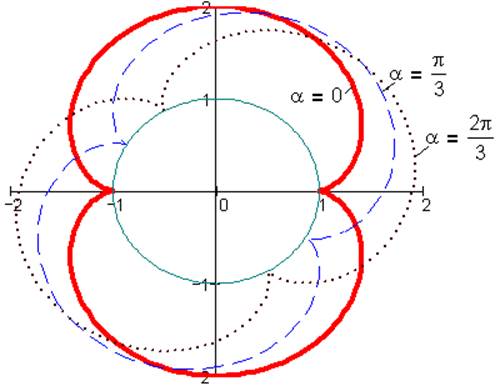
Рис. 2. Эпициклоида при k=1, i=0.5, λ=0.5
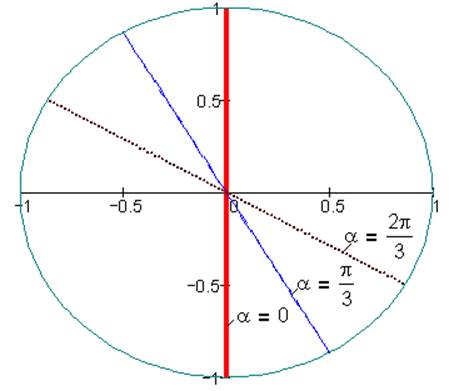
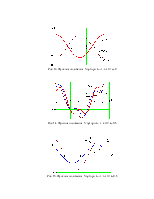
Рис. 3. Гипоциклоида при k= - 1, i=0.5, λ=0.5
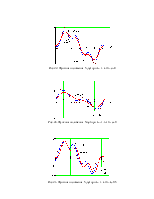
Для точек, лежащих на подвижном колесе радиуса r (λ=0.5) при внутреннем зацеплении траектории точек В представляют собой прямые линии. Для точек, лежащих вне подвижной окружности (l>r) траектории точки В – удлиненные эпициклоиды (рис. 4) для внешнего и гипоциклоиды для внутреннего (рис.5) зацепления. Изменение угла α поворачивает циклоидальную кривую вокруг центра начала координат.
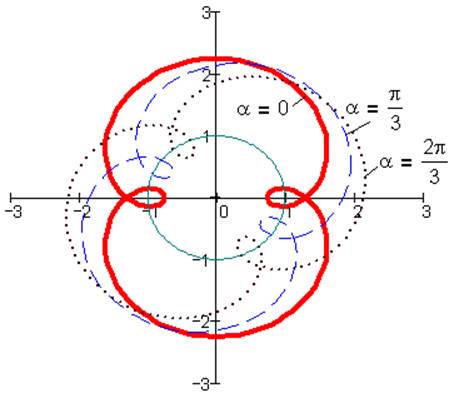
Рис. 4. Эпициклоида при k=1, i=0.5, λ=0.75
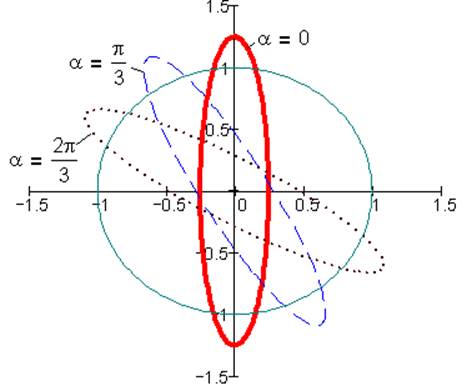
Рис. 5. Гипоциклоида при k= - 1, i=0.5, λ=0.75
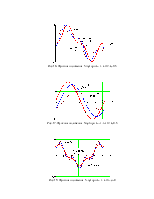
Для точек, лежащих внутри подвижной окружности (l<r) траектории точки В – укороченные эпициклоиды (рис. 6) для внешнего и гипоциклоиды для внутреннего (рис.7) зацепления.
Изменение параметра i изменяет число петель траектории.
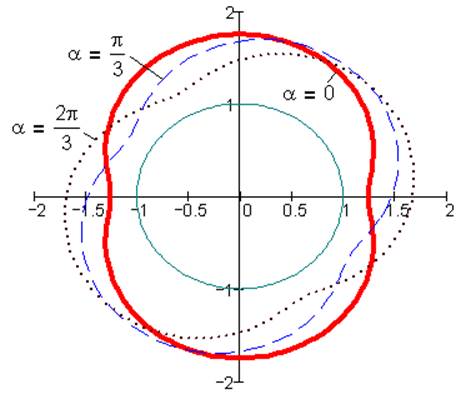
Рис. 6. Эпициклоида при k=1, i=0.5, λ=0.25
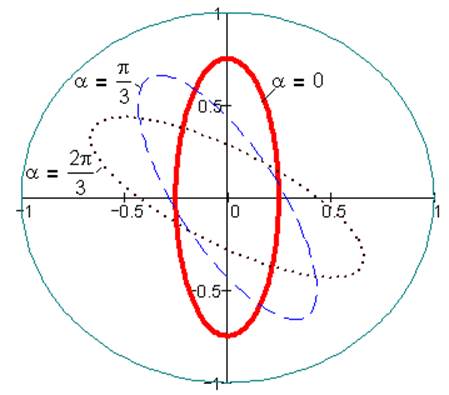
Рис. 7. Гипоциклоида при k= - 1, i=0.5, λ=0.25
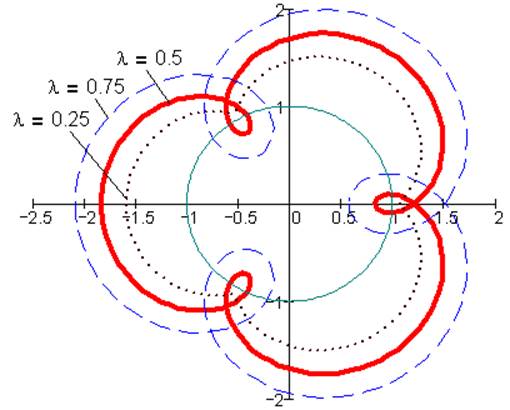
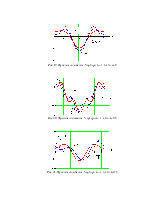
Рис. 7. Эпициклоиды при k=1, i=1/3, α=0
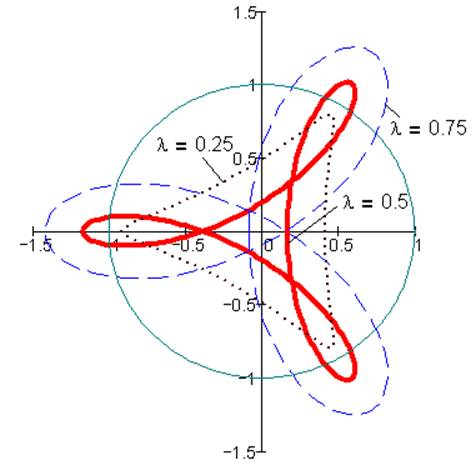
Рис. 8. Гипоциклоиды при k= -1, i=1/3, α=0
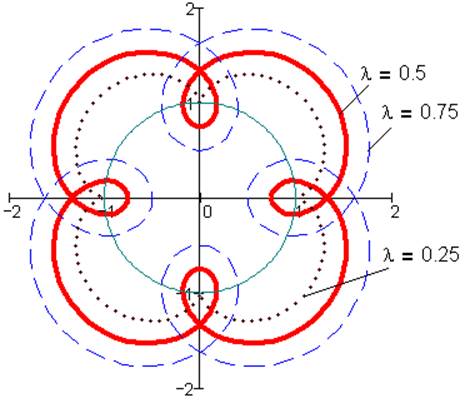
Рис. 9. Эпициклоиды при k= 1, i=1/4, α=0
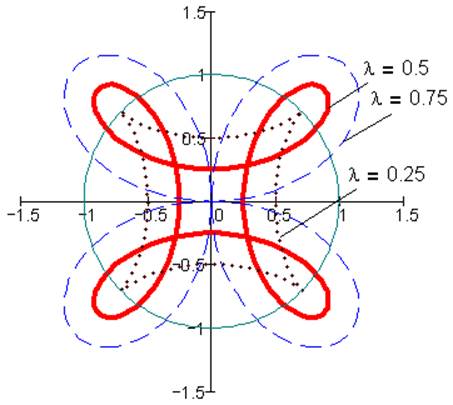
Рис. 10. Гипоциклоиды при k= -1, i=1/4, α=0
1. Присоединим в точке В группу Ассура, состоящую из двух поступательных и одной вращательной пары (2ПВ), рис.11 и постоим диаграммы S1(φ) и S2(φ), рис.12 – рис.25.
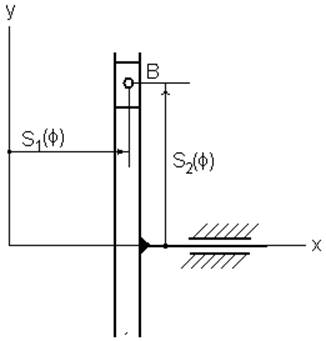
Рис. 11. Прицепная группа Асура 2ПВ
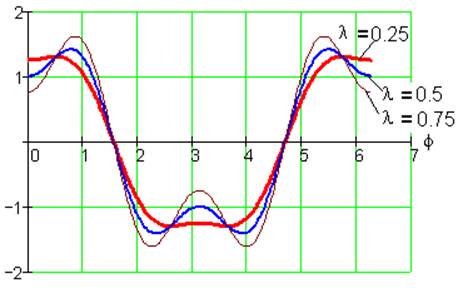
Рис. 12. Функция положения S1(φ) при k= 1, i=1/2, α=0
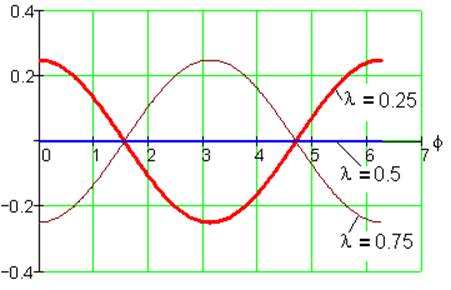
Рис. 13. Функция положения S1(φ) при k= -1, i=1/2, α=0
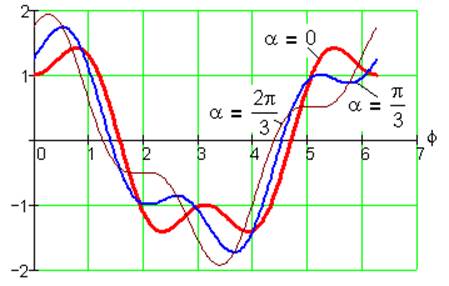
Рис. 14. Функция положения S1(φ) при k= 1, i=1/2, λ=0.5
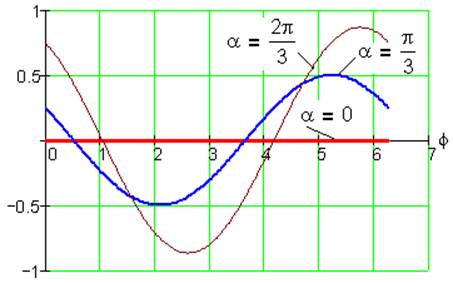
Рис. 15. Функция положения S1(φ) при k= -1, i=1/2, λ=0.5
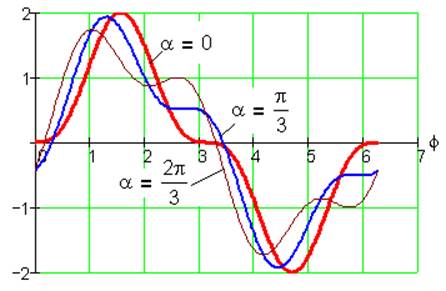
Рис. 16. Функция положения S2(φ) при k= 1, i=1/2, λ=0.5
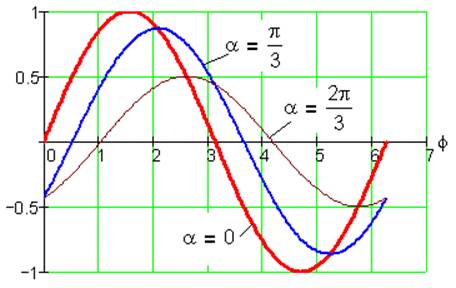
Рис. 17. Функция положения S2(φ) при k= -1, i=1/2, λ=0.5
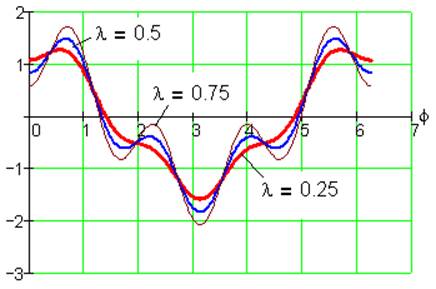
Рис. 18. Функция положения S1(φ) при k= 1, i=1/3, α=0
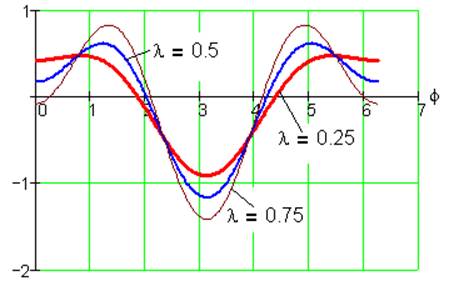
Рис. 19. Функция положения S1(φ) при k= -1, i=1/3, α=0
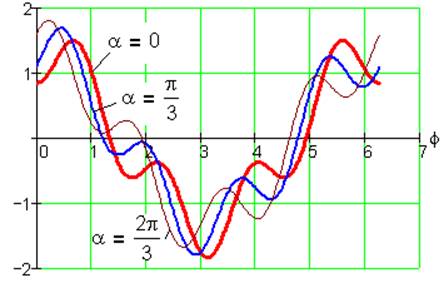
Рис. 20. Функция положения S1(φ) при k= 1, i=1/3, λ=0.5
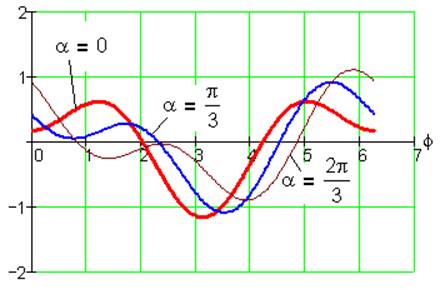
Рис. 21. Функция положения S1(φ) при k= -1, i=1/3, λ=0.5
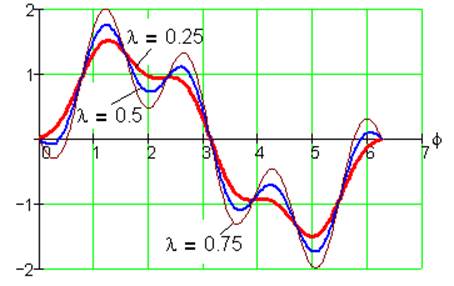
Рис. 22. Функция положения S2(φ) при k= 1, i=1/3, α=0
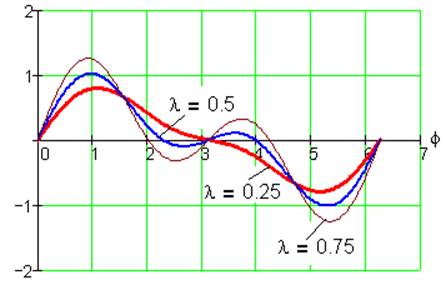
Рис. 23. Функция положения S2(φ) при k= -1, i=1/3, α=0
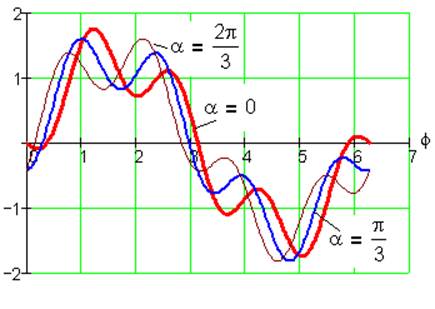
Рис. 24. Функция положения S2(φ) при k= 1, i=1/3, λ=0.5
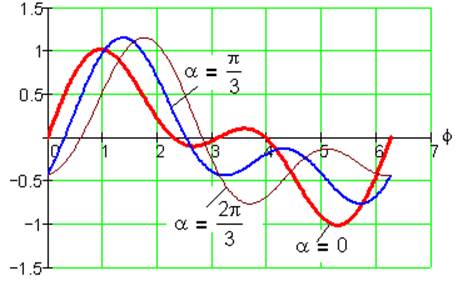
Рис. 25. Функция положения S2(φ) при k= -1, i=1/3, λ=0.5
2. Присоединим в точке В группу Ассура, состоящую из двух вращательных и одной поступательной пары (2ВП), рис.26 и постоим диаграммы ζ(φ) и S(φ), рис.12 – рис.25.
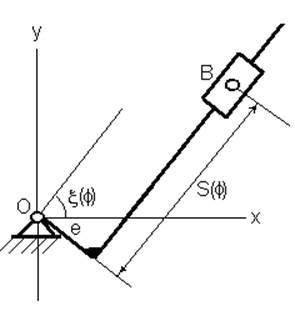
Рис. 26. Прицепная группа Асура 2ВП
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.