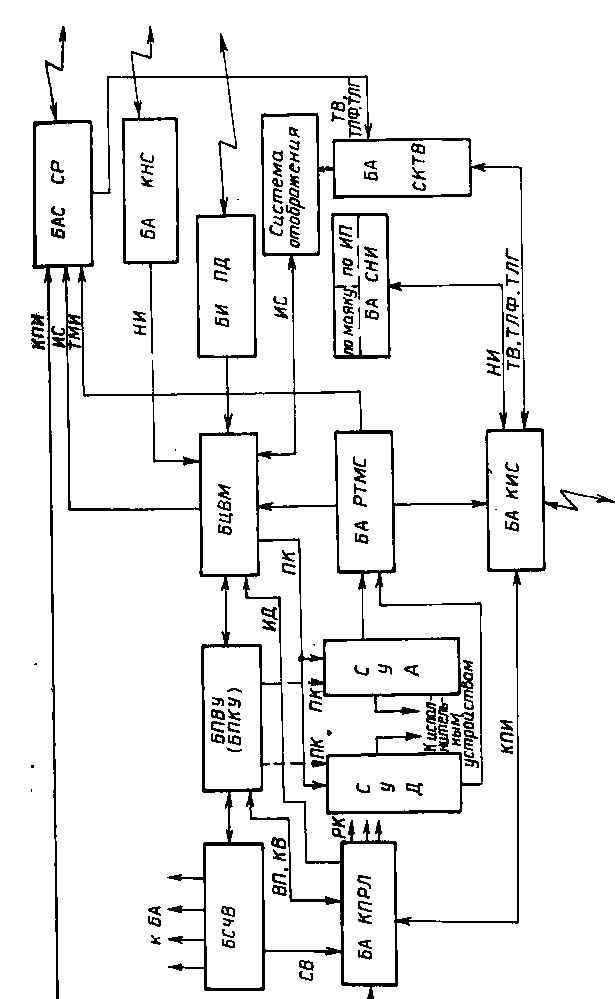
В неавтономном режиме передаваемые РК после дешифрирования в БА КПРЛ ведут к немедленному срабатыванию соответствующих устройств систем управления аппаратурой (СУА) и движением (СУД) КА. Временные программы (ВП) записываются в бортовое программно-временное устройство (БПВУ), и их содержание отрабатывается по результатам сравнения текущего бортового времени с временной частью слов ВП. Реализуется это за счет выдачи с БПВУ в СУА и СУД программных команд (ПК); соответствующих параметрической части слов ВП .Съем телеметрической и телесигнализационной информации (ТМИ, ТСИ), проведение навигационных измерений осуществляется с помощью БА РТМС и БА СНИ. При наличии СР обмен КИИ и ТМИ между КА и наземными пунктами может производиться через бортовую аппаратуру связи со СР (БАС СР).
Для полуавтономного режима дополнительно необходимо наличие БЦВМ, БА навигационных измерений по наземным маякам (БА СНИ по маяку) или космическим навигационным системам (БА КНС). При этом исходные данные (ИД), поступающие с Земли непосредственно (через БА СРТС) или через СР (БАС СР), используются БЦВМ для расчета временных или координатных программ, которые запоминаются в БПВУ (БПКУ) и далее отрабатываются в СУА и СУД. БЦВМ обрабатывает результаты навигационных измерений, поступающих от БА СНИ или БАС КНС, определяет и прогнозирует местоположение и движение КА. С помощью БЦВЫ по данным телеконтроля оценивается состояние бортовой аппаратуры, систем, агрегатов и экипажа. Полученные результаты (информация о состоянии) выдаются на систему отображения (для пилотируемых КА) и передаются через БАС СР на Землю.
Для автономного режима, кроме указанных систем, которые могут использоваться либо непрерывно (БСЧВ, БПВУ, БЦВМ), либо ограниченное время на определенных этапах полета или в предусмотренные интервалы времени, на борту необходимо наличие автономных измерителей параметров движения (БИ ОД). Они могут применяться и в полуавтономном режиме (для улучшения характеристик БКУ), но в автономном режиме без них принципиально не обойтись, так как даже работу с использованием орбитальных маяков и при баззапросном методе измерений по КНС нельзя считать полностью автономной. БИ ПЦ обычно представляет собой комплексированную систему из радиотехнических (частотный или импульсный высотомер, радиовертикаль), инфракрасных (тепловертикаль), оптических (реперы направлений на определенные небесные тела), инерциальных (гироплатформы) и других устройств. Совместная обработка разнородной навигационной информации обеспечивает высокую точность местоопределения.
БЦВМ в автономном режиме может менять периодичность и программу опроса датчиков БА РМС.
Большой объем задач, возлагаемый на БЦВМ в полуавтономном и в автономном режимах, требует от нее высокого быстродействия и большого объема памяти, возможности безотказной работы за все время существования КА и устойчивости по отношению к различного рода воздействиям.
3.3 СТРУКТУРНЫЕ МЕТОДЫ ПОВЫШЕНИЯ ОПЕРАТИВНОСТИ, ГЛОБАЛЬНОСТИ И НАДЕЖНОСТИ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ
Ограниченность территории не представляет возможным обеспечить требуемую оперативность, непрерывность и глобальность управления КА. Используются внешние элементы – измерительные комплексы, морского, и космического базирования.
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.