Индукционные преобразователи вибрации (как и пьезоэлектрические) относятся к датчикам генераторного типа. Принцип действия индукционных преобразователей основан на явлении электромагнитной индукции, т.е. на возникновении электродвижущей силы (ЭДС) в электрической катушке при изменении магнитного поля. Таким образом, в них измеряется виброскорость, так как именно она вызывает изменение магнитного поля в датчике. Поэтому чувствительность таких датчиков характеризуется величиной напряжение/виброскорости, (В/м/с).
К достоинствам индукционных преобразователей можно отнести простоту конструкции и надежность в эксплуатации. Основной их недостаток связан с принципом действия, практически ограничивающим нижний диапазон измеряемых частот пределом 8 – 10 Гц. Кроме того, индукционные преобразователи имеют значительно бóльшую массу, чем пьезоэлектрические, что снижает максимальное значение измеряемых частот до 500 – 1500 Гц.
Конструктивно индукционный преобразователь состоит из корпуса, сейсмической массы на маятниковой или осевой подвеске и индукционного элемента. При колебаниях сейсмической массы происходит относительное перемещение катушки и постоянного магнита специальной формы, в результате чего в катушке наводится ЭДС. Для повышения чувствительности преобразователя увеличивают число витков катушки. Но увеличение числа витков приводит к повышению реактивного сопротивления катушки и увеличению массы преобразователя, а следовательно, к уменьшению частотного диапазона измерения со стороны высоких частот.
Многие из существующих индукционных преобразователей обладают чувствительностью, достаточной для регистрации измерительного электрического сигнала без дополнительного усиления. Характеристики некоторых отечественных индукционных преобразователей приведены в таблице 4.7.
Табл. 4.7
|
Модель ИП |
Коэффициент электромеханической связи, В∙с/м |
Габаритные Размеры, мм |
Масса, кг |
|
И001 |
12 |
135×75×75 |
1,5 |
|
И002 |
0,8 |
185×172×160 |
4 |
|
ВИБ-А |
10 – 30 |
340×160×145 |
10,6 |
|
СТКД |
3 – 4 |
700×380×300 |
30 |
|
СВКД |
2 – 3 |
40 |
|
|
ДС-В |
400 |
856×366×422 |
70 |
|
ВДК |
– |
Ø52×110 |
0,47 |
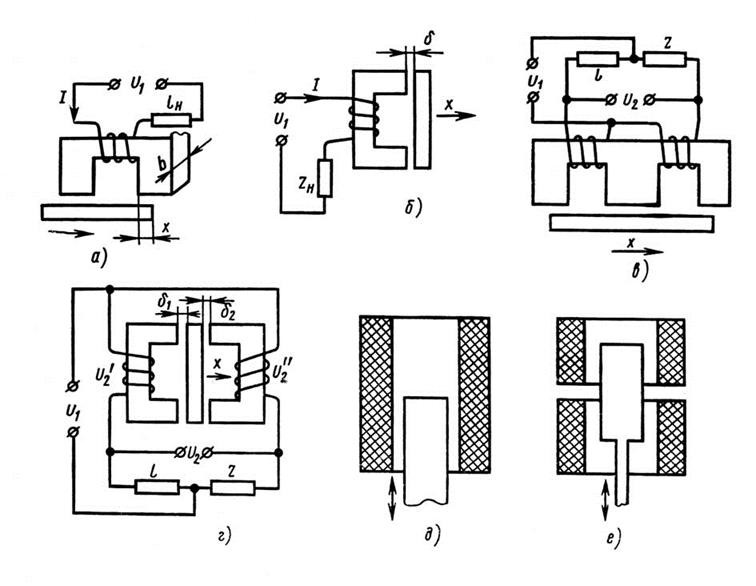
Индуктивный преобразователь является параметрическим - перемещение одного из его элементов при вибрации вызывает изменение индуктивности системы и ее сопротивления переменному току.
На рисунке 4.10 показаны основные схемы построения индуктивных преобразователей – с переменной площадью зазора, с переменной длиной зазора и с подвижным цилиндрическим сердечником. Для всех вариантов обычно используется дифференциальная мостовая схема включения.
Индуктивные преобразователи имеют гораздо меньшую массу, чем индукционные, тем не менее, область их применения ограничена измерением низкочастотных вибраций. Это связано с тем, что частота тока питания (несущего сигнала) не может превышать 3 – 5 кГц из-за возникновения вихревых магнитных потоков в сердечнике и значительных паразитных емкостей и индуктивностей соединительных проводов. При этом для надежной работы преобразователя необходимо, чтобы частота измеряемого процесса была в 5 – 10 раз ниже частоты несущего сигнала.
Основным достоинством индуктивных преобразователей является их простота, возможность применения при повышенных температурах и высокая чувствительность.
Одним из наиболее распространенных классов параметрических преобразователей параметров вибрации являются емкостные измерительные преобразователи. Они состоят из подвижной и неподвижной частей, относительное перемещение которых приводит к изменению емкости преобразователя:
 [пФ], 4.6
[пФ], 4.6
где ε – диэлектрическая проницаемость среды;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.