Цель работы: ознакомиться с назначением, изучить принцип действия, работу корректора.
1. ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
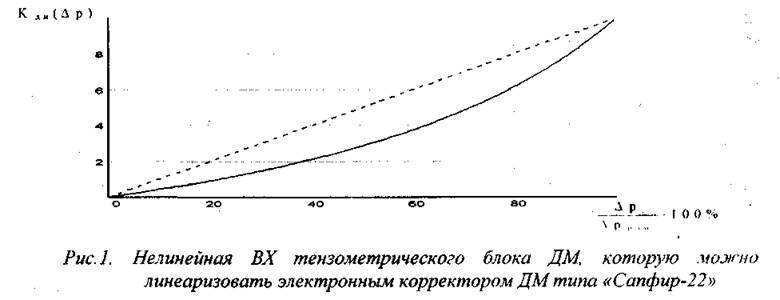
Основной причиной нелинейности дифмонометрического преобразователя (ДМ) является нелинейность мембранного блока.
В [2, с. 180-182; 3, с.365-374] показано, что чувствительные элементы в ДМ (мембраны, мембранные коробки, сильфоны и т.д.) имеют нелинейную зависимость перемещения определенной точки чувствительного элемента от действующей нагрузки (давления или разности давления). Изменение формы поверхности мембраны (гофрирование и т.д.) не всегда позволяет достичь необходимой линейности выходной характеристики ВХ. Поэтому на практике прибегают к электронной коррекции ВХ ДМ. Такая коррекция позволяет в необходимых пределах уменьшать отклонение реальной ВХ ДМ от линейного закона и является одним из наиболее применяемых методов повышения точности современных ДМ, изготавливаемых как в СНГ, так и за рубежом [56; 57, с.1073; 58, с.26; 59, с.27].
Структура электронного корректора и способ коррекции ВХ ДМ зависят от вида нелинейности. Анализ способов линеаризации ВХ
В [28, с.286; 61, с.246] для линеаризации ВХ предлагается использовать специальные нелинейные звенья, которые включаются либо до, либо после преобразователя. В этих звеньях линеаризация достигается кусочно-линейной аппроксимацией и выполняется, как правило, с помощью последовательно соединенных резисторов, шунтированных стабилитронами или диодами.
В [58, с.26; 62, 63] описан способ линеаризации ВХ ДМ «Сапфир-22», суть которого заключается в охвате измерительного блока ДМ отрицательной обратной связью с последующим подбором определенных значений коэффициентов прямого тракта и обратной связи для каждого ДМ в отдельности
Разработка способа и устройства линеаризации ВХ
ДМ с ДТД имеют четыре вида характерных нелинейностей ВХ. Эти нелинейности, как видно из рис. 4.2 ... 4.4, отличаются друг от друга знаком отклонения ВХ ДМ от линейного закона. Знак отклонения может быть как отрицательный (рис. 4.2) или положительный (рис. 4.3) так и знакопеременный (рис. 4.4.а,б).
|
|

Суть предлагаемого способа коррекции заключается в формировании из выходного сигнала ВС преобразователя корректирующего напряжения, которое при алгебраическом суммировании с ВС преобразователя (входным сигналом устройства линеаризации) позволяет получить на выходе устройства линеаризации сигнал, линейно связанный с величиной разности давлений [64, с. 86].
Структурная схема преобразователя ВС ДТД с электронным устройством линеаризации и графическое пояснение принципа линеаризации для одного из видов отклонений представлены на рис. 4.5,а,б, где введены следующие обозначения: ивЫх(Ар) - ВС преобразователя (Пр); UBX. кор(Ар) - входной сигнал устройства линеаризации; ФКН - формирователь корректирующего напряжения; ифкн(Др) -корректирующее напряжение; ивых. кор(Ар) - ВС устройства линеаризации.
Устройство линеаризации состоит из сумматора и формирователя корректирующего напряжения (ФКН), в котором для создания необходимой формы напряжения используется принцип кусочно-линейной аппроксимации [65, с.5-10; 66, с. 104-129]. В этом случае для образования линейных участков аппроксимации требуется линейно-нарастающее напряжение, зависящее от разности давления. Однако, такое напряжение в преобразователе ВХ ДТД принципиально невозможно получить поскольку, как показано в начале главы, зависимость ивЫх(Ар) - нелинейная. Поэтому вместо него для формирования корректирующего напряжения используется выходное напряжение преобразователя ивых(Ар) с нелинейной зависимостью от разности давления.
Принцип формирования корректирующего напряжения поясняется рис. 4.6, б-д. Из напряжения иВЫх(Ар) формируются напряжения вида ао-ивых(Ар) и напряжения вида
ai[UBHX(Ap)-Ui)]-F{sign[UBbIX(Ap)-Uj]} (рис. 4.6, в, г, д). Корректирующее напряжение получается в результате суммирования этих напряжений и имеет вид: (4.1)
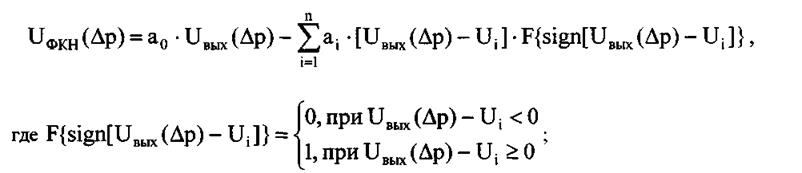
i, n - номер и количество участков, с помощью которых формируется необходимое корректирующее напряжение;
Uj - значение выходного некорректированного напряжения на конце 1-го участка коррекции.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
