1. Заданием на курсовую работу выданы зубчатые колёса: m=3мм, z1=30, z2=98.
2. Для заданного зубчатого зацепления назначаем степени точности по нормам точности.
Так как передача кинематическая, начинаем с выбора степени точности по норме кинематической точности.
8 – по норме кинематической точности,
9 – по норме плавности,
9 – по норме полноты контакта зубьев.
Вид сопряжения выбираем – B, ему соответствует вид допуска на боковой зазор – h и класс точности отклонения межосевого расстояния – II.
Таким образом, обозначение зубчатой передачи:
8-9-9-B ГОСТ1643-81 ![]()
![]()
3. Для заданных степеней точности выбираем показатели контрольного комплекса:
F’io – допуск на кинематическую погрешность передачи;
F’io=(Fp1+ff1)+(Fp2+ff2)=(63+14)+(125+18)=220мкм.
fx – допуск параллельности осей.
fx=63мкм;
fy – допуск на перекос осей;
fy=30мкм;
Суммарное пятно контакта:
- по высоте зубьев – не менее 30%;
- по длине зубьев – не менее 40%.
Ea’’s - верхнее предельное отклонение межосевого расстояния
Ea’’i - нижнее предельное отклонение межосевого расстояния
Ea’’s =+fi’’=+40мкм;
Ea’’i=-TH=-200мкм.
3.4 Расчет длины общей нормали.
Длина общей нормали W определяется в зависимости от числа охватываемых зубьев:
Zn=0,111×Z+0,5=0,111×98+0,5=10;
При Zn=10 и Z=98 дано W1=30,7766мм (W1=W при m=3мм), тогда W=W1×m=30,7766×3=92,33мм.
Отклонения средней длины общей нормали:
EWms(I)= -200мкм - наименьшее отклонения средней длины общей нормали (слагаемое 1);
EWms(II)= -18мкм - наименьшее отклонения средней длины общей нормали (слагаемое II);
EWm=(-200)+(-18)=-218мкм;
Допуск на среднюю длину общей нормали
ТWm=100мкм;
EWmi= EWm-ТWm=-218-100=-318мкм;
Длина
общей нормали W=92,33![]() мм.
мм.
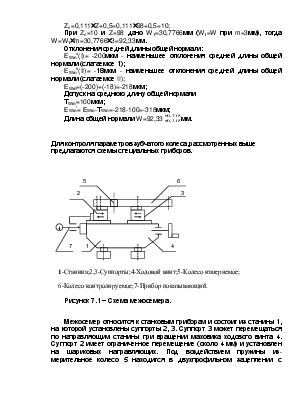
Для контроля параметров зубчатого колеса,рассмотренных выше предлагаются схемы специальных приборов.
5 6
 23
23
7 14
1-Станина;2,3-Суппорты;4-Ходовой винт;5-Колесо измеряемое;
6-Колесо контролируемое;7-Прибор показывающий.
Рисунок 7.1 – Схема межосемера.
Межосемер относится к станковым приборам и состоит из станины 1, на которой установлены суппорты 2, 3. Суппорт 3 может перемещаться по направляющим станины при вращении маховика ходового винта 4. Суппорт 2 имеет ограниченное перемещение (около 4 мм) и установлен на шариковых направляющих. Под воздействием пружины измерительное колесо 5 находится в двухпрофильном зацеплении с контролируемым колесом 6. Колебания измерительного межосевого расстояния снимаются с показаний прибора 7.
W
Рисунок 7.2 – Схема нормалимера.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.