



















МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ УКРАЇНИ
“КИЇВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ”
Кафедра прикладної гідроаеромеханіки і механотроніки
АВТОМАТИЗОВАНИЙ ПНЕВМОПРИВОД
МА61.05.КППП.000.ПЗ
КУРСОВИЙ ПРОЕКТ
за курсом «Об‘ємний пневмопривод»
|
Керівник: Доц. каф. ПГіМ С.В.Носко «Допущений до захисту» ___________________2010р. Захищений з оцінкою ____________________ Підпис |
Виконавець: ст. Доля М.О. гp. МА-61 Зал. книжка № МА6105 _________________ Особистий підпис |
НТУУ «КПІ», 2010
 ЗМІСТ
ЗМІСТ
ВСТУП
1. ПОЧАТКОВІ ДАНІ
2. ОПИС РОБОТИ ПНЕВМАТИЧНОЇ СХЕМИ
3. СТАТИЧНИЙ РОЗРАХУНОК ОСНОВНОГО ПРИВОДУ
3.1. Вибір трубопроводів і пневмоапаратури
4. ДИНАМІЧНИЙ РОЗРАХУНОК ОСНОВНОГО ПРИВОДУ
4.1. Знаходження пропускної здатності пневмоліній
4.1.1. Знаходження пропускної здатності напірної пневмолінії
4.2. Врахування об’ємів трубопроводів при динамічному розрахунку
4.2.1. Врахування об’ємів трубопроводів при динамічному розрахунку напірної пневмолінії
4.3. Визначення часу підготовчого періоду
4.4. Визначення часу руху
4.5. Визначення часу заключного періоду
4.6. Визначення часу прямого ходу
4.7. Діаграма роботи пневмоциліндра двосторонньої дії
ЛІТЕРАТУРА
 ВСТУП
ВСТУП
Пневматичні систему керування (ПСК) поряд з гідравлічними та електричними системами є одними з найбільш ефективних засобів автоматизації та механізації виробничих процесів.
Оснащення ПСК машин та устаткування складає (від загального випуску): пакувальних машин до 90%; зварювальних та ливарних машини до 70%; автоматичних маніпуляторів до 50%; ковальсько-пресових машин більше 40%; вугільновидобувних машин більше 30%; прального устаткування до 40%; текстильних та взуттєвих машин, деревооброблюючого та харчового устаткування 20%.
Переваги ПСК особливо проявляються за механізації та автоматизації наступних найбільш масових операцій: затискання деталей, їх фіксації, кантування, складання, контролю лінійних розмірів, транспортування, пакування та інших, що дозволяють виключити або звести до мінімуму участь людини в тяжких та монотонних роботах, при чому продуктивність праці на цих операціях зростає у 1,5–4 рази.
Широкому
впровадженню ПСК в машинобудуванні сприяють їх позитивні якості: відносна
простота конструкції та експлуатаційного обслуговування, а отже, низька
вартість та швидка окупність витрат; надійність роботу в широкому діапазоні
температури, високої вологості та запиленості оточуючого середовища; пожежо- та
вибухобезпечність; великий строк служби, який досягає 10000–20000 год. (10–50
млн. циклів); висока швидкість переміщення вихідної ланки пневматичних
виконавчих пристроїв (лінійної до 15 ![]() , обертової до 100000
, обертової до 100000 ![]() ); легкість отриманні та відносна простота
передачі енергоносія (стиснуте повітря), можливість постачання ним великої
кількості споживачів від одного джерела; відсутність потреби в захисних
пристроях при перенавантаженні (пневмодвигуни можуть бути загальмовані до
повної зупинки без небезпеки пошкодження та можуть залишатися під навантаженням
практично без споживання енергії).
); легкість отриманні та відносна простота
передачі енергоносія (стиснуте повітря), можливість постачання ним великої
кількості споживачів від одного джерела; відсутність потреби в захисних
пристроях при перенавантаженні (пневмодвигуни можуть бути загальмовані до
повної зупинки без небезпеки пошкодження та можуть залишатися під навантаженням
практично без споживання енергії).
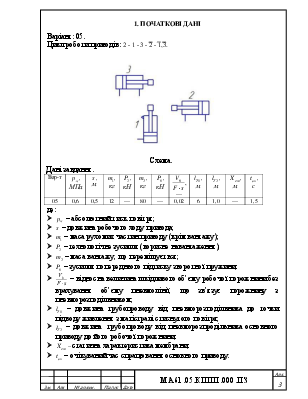
 1. ПОЧАТКОВІ ДАНІ
1. ПОЧАТКОВІ ДАНІ
Варіант: 05.
![]()
![]()
![]() Цикл роботи приводів: 2 - 1 - 3 - 2 - 1,3.
Цикл роботи приводів: 2 - 1 - 3 - 2 - 1,3.
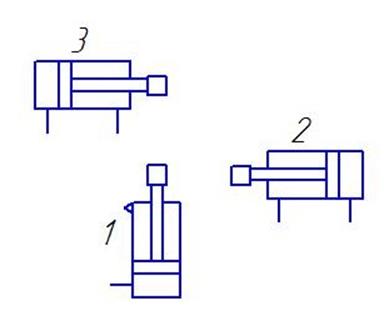
Схема.
Дані завдання.
|
Вар-т |
|
|
|
|
|
|
|
|
|
|
|
|
05 |
0,6 |
0,5 |
12 |
–– |
80 |
–– |
0,02 |
6 |
1,0 |
–– |
1,5 |
де:
Ø ![]() –
абсолютний тиск повітря;
–
абсолютний тиск повітря;
Ø ![]() –
довжина робочого ходу привода;
–
довжина робочого ходу привода;
Ø ![]() – маса рухомих частин приводу (крім вантажу);
– маса рухомих частин приводу (крім вантажу);
Ø ![]() – технологічне
зусилля (корисне навантаження);
– технологічне
зусилля (корисне навантаження);
Ø ![]() – маса
вантажу, що переміщується;
– маса
вантажу, що переміщується;
Ø ![]() – зусилля попереднього підтиску зворотної пружини;
– зусилля попереднього підтиску зворотної пружини;
Ø ![]() – відносна величина
шкідливого об’єму робочої порожнини без врахування об’єму пневмолінії, що
зв’язує порожнину з пневморозподільником;
– відносна величина
шкідливого об’єму робочої порожнини без врахування об’єму пневмолінії, що
зв’язує порожнину з пневморозподільником;
Ø ![]() – довжина трубопроводу від пневморозподільника до точки підводу
живлення з магістралі стиснутого повітря;
– довжина трубопроводу від пневморозподільника до точки підводу
живлення з магістралі стиснутого повітря;
Ø ![]() –
довжина трубопроводу від пневморозпродільника основного приводу до його
робочої порожнини;
–
довжина трубопроводу від пневморозпродільника основного приводу до його
робочої порожнини;
Ø ![]() – статична характеристика мембрани;
– статична характеристика мембрани;
Ø ![]() –
очікуваний час спрацювання основного приводу.
–
очікуваний час спрацювання основного приводу.
 2. ОПИС РОБОТИ ПНЕВМАТИЧНОЇ СХЕМИ
2. ОПИС РОБОТИ ПНЕВМАТИЧНОЇ СХЕМИ
![]()
![]()
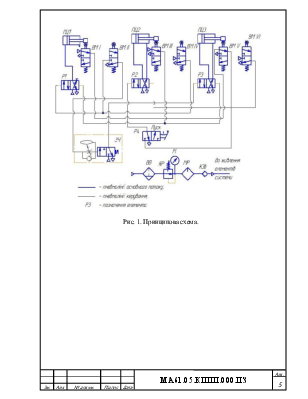
![]() На схемі (див. рис. 1)
показана пневматична схема, що забезпечує автоматичну роботу 3-х
пневмоциліндрів за циклом 2 - 1 - 3 - 2 - 1,3.
На схемі (див. рис. 1)
показана пневматична схема, що забезпечує автоматичну роботу 3-х
пневмоциліндрів за циклом 2 - 1 - 3 - 2 - 1,3.
На схемі поршні пневмоциліндрів знаходяться у вихідному положенні. Кулачки, що встановлені на їх штоках, впливають на пневмоклапани ВМ І, ВМ ІІ, ВМ ІІІ, ВМ ІV, ВМ V, ВМ VІ, на виходах яких утворюються командні сигнали.
Після вмикання пневморозподільника Р4 сигнал від ВК5 перемикає розподільник Р2 в ліве положення. Пневмоциліндр ПЦ2 висувається. При повному висуванні до крайнього положення, кулачок ПЦ2 натискає на пневмоклапан ВМ ІV. ВМ ІV утворює командний сигнал, який перемикає розподільник Р4 в ліве положення. Пневмоциліндр ПЦ1 висувається. При повному висуванні до крайнього положення, кулачок ПЦ1 натискає на пневмоклапан ВМ ІІ, переводить його у «відкрите» положення, і крізь нього вільно проходить сигнал з ВМ ІV – командний сигнал, що надходить у пневмоклапан витримки часу ЗЧ. При проходженні необхідного налаштованого проміжку часу, пневмоклапан ЗЧ відкривається, і подає командний сигнал, що перемикає розподільник Р3 у ліве положення. Пневмоциліндр ПЦ3 висувається. При повному висуванні до крайнього положення, кулачок ПЦ3 натискає на пневмоклапан ВМ VІ. ВМ VІ утворює командний сигнал, який перемикає розподільник Р2 в праве положення. ПЦ2 втягується і кулачком натискає на пневмоклапан ВК ІІІ. Сигнал від ВМ ІІІ перемикає розподільники Р1 і Р3 в праве положення, ПЦ1, ПЦ3 втягуються. Цикл повторюється.
Для зупинки циклу треба вимкнути Р4.
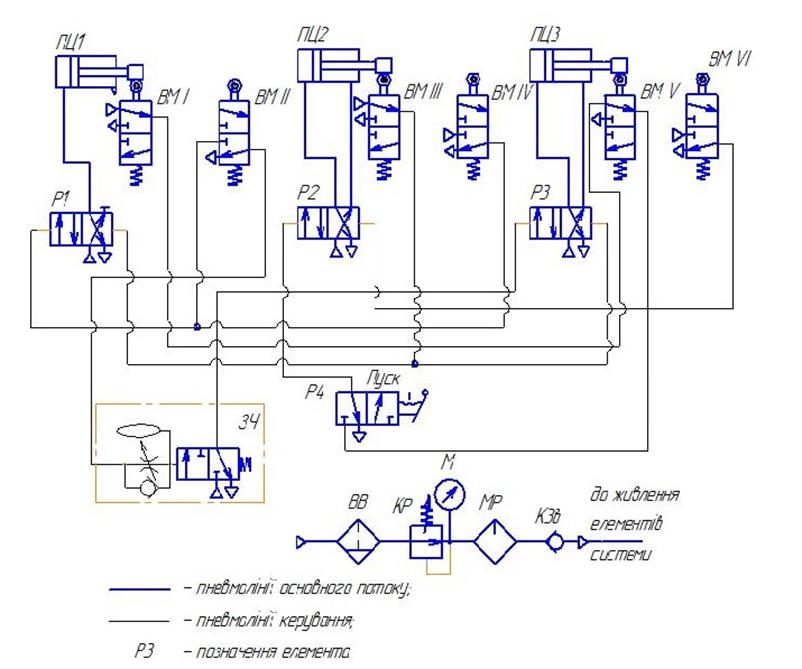
 Рис. 1. Принципова схема.
Рис. 1. Принципова схема.
 3. СТАТИЧНИЙ РОЗРАХУНОК ОСНОВНОГО
ПРИВОДУ
3. СТАТИЧНИЙ РОЗРАХУНОК ОСНОВНОГО
ПРИВОДУ
В даній схемі основним приводом є пневматичний поршневий підіймач, який є пневмоциліндром односторонньої дії з вертикальним розташуванням, у якого повернення поршня в початкове положення виконується під дією ваги рухомих частин, а робочій хід – під дією тиску стиснутого повітря, що підводиться в робочу порожнину. Технологічне навантаження прикладене по всій довжині ходу, тому діаметр циліндра знаходимо по розрахунковій величині безрозмірного параметра навантаження Χр при непрямому врахуванні сили тертя за допомогою коефіцієнту κt,:
 6,93
6,93![]() 10-2 м=69,3 мм
10-2 м=69,3 мм
Значення Χр
вибираємо в залежності від рівня тиску повітря, що підводиться. При ![]() безрозмірний параметр
навантаження матиме значення
безрозмірний параметр
навантаження матиме значення ![]() Приймаємо
Приймаємо ![]()
Коефіцієнт κt для пневмоциліндрів з
манжетними ущільненнями поршню вибираємо в залежності від технологічного
зусилля. При ![]() , коефіцієнт κt дорівнюватиме 0,2.
, коефіцієнт κt дорівнюватиме 0,2.
Знайдене значення величини D округлюємо до ближнього значення з нормованого ряду діаметрів по ГОСТ 6540-63 (в мм): D=63 мм.
Діаметр штока знаходимо зі співвідношення:
![]()
Отримане значення округлюємо до найближчого значення ряду (в мм). Приймаємо d=16 мм.
Умовний прохід
приєднувальних отворів пневмоциліндру вибираємо згідно рекомендаціям зі
співвідношення ![]() Однак, при виборі величини dy необхідно також враховувати
довжину руху поршня та необхідну швидкодію приводу:
Однак, при виборі величини dy необхідно також враховувати
довжину руху поршня та необхідну швидкодію приводу:
![]()

 де
де ![]() - середня швидкість потоку
стиснутого повітря в підвідній лінії при наповненні робочої порожнини
пневмоциліндру.
- середня швидкість потоку
стиснутого повітря в підвідній лінії при наповненні робочої порожнини
пневмоциліндру.
3.1. Вибір трубопроводів і пневмоапаратури
Знайдене
при статичному розрахунку основного приводу значення умовного проходу
приєднувальних отворів використовується для вибору трубопроводів, які зв’язують
порожнини приводу з пневморозподільником, а також самого пневморозподільника.
Їх прохідні розтини повинні відповідати вибраному значенню ![]() .
.
Для допоміжних приводів, щоб запобігти довгої номенклатури пневмоапаратів та трубопроводів, які використовують в пневмосистемі, рекомендується пневморозподілювачі та їх лінії зв’язку вибирати аналогічними основному приводу, як це робиться звичайно на практиці.
Фільтр вологовідділювач типу 2 по ГОСТ 17437-72 (ном. Тиск 1,0 МПа; тонкість фільтрації 40 мкм; ступінь волого відділення 90%) 22-12х40
|
Умовний прохід, |
12 |
|
Приєднувальна різьба |
К3/8” |
|
Витрата повітря, |
|
|
номінальна |
1,25 |
|
мінімальна |
0,25 |
|
Номінальний перепад тиску, МПа, не більше |
0,008 |
|
Номінальна ємність резервуара для збору конденсату, дм3 |
0,1 |
|
Маса, |
1,05 |
|
Спосіб відведення конденсату |
ручний |
 Пневморозподільник В76-21 (ВМ І–ВМ VI)
Пневморозподільник В76-21 (ВМ І–ВМ VI)
|
Умовний прохід, |
4 |
|
Тиск живлення, |
0–0,63 |
|
Витрата повітря при тиску 0,4 |
0,032 |
|
Втрати тиску при вказаній витраті, не більше, МПа |
0,02 |
|
Пропускна здатність |
3 |
|
Зусилля, необхідне для відкриття клапана при номінальному тиску, Н, не більше |
35 |
|
Довговічність, цикл |
106 |
|
Маса,
|
0,27 |
Пневмоклапан витримки по часу П-КВВ-4/10
|
Умовний прохід, |
4 |
|
Тиск, |
|
|
номінальний |
1,0 |
|
мінімальний |
0,25 |
|
Мінімальний тиск керування, МПа |
0,025 |
|
Пропускна здатність |
4 |
|
Час витримки, с |
0,5…15 |
|
Зміна часу витримки при постійному тиску на вході (коливання тиску |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 ––
––