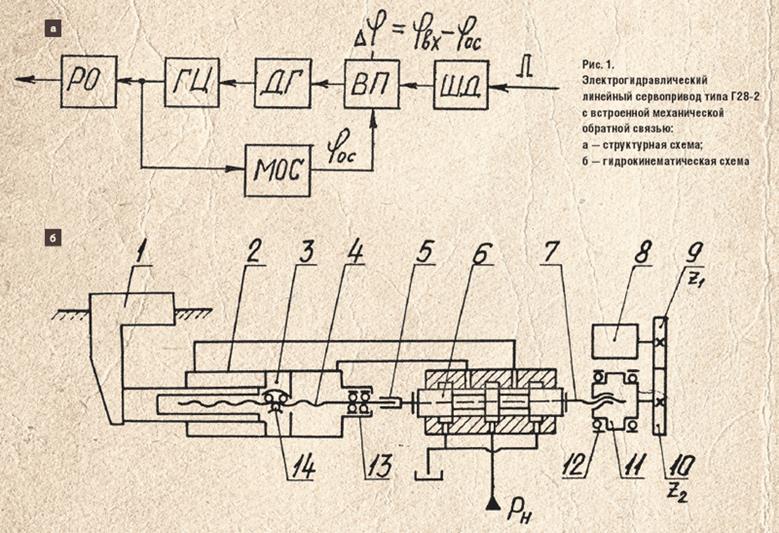
У лінійному електрогідравлічному кроковому приводі (ЛЭГШП) типу Г 28-2 вузол керування повністю уніфікований із приводом обертового руху. Електричні керуючі імпульси подаються на ШД (мал. 3.34). Поворот вала ШД через гайку / і гвинт 2 викликає зсув золотника дроселюючого розподільника РДР. Масло під тиском направляється в робочі порожнини гідроциліндра (Ц), поршень і шток гідроциліндра переміщаються. Гайка 8 із трьохзаходним несамогальмівним трапецеїдальним різьбленням закріплене на поршні. При роботі привода шток з'єднаний із приводиться вузлом, що (не показаний) і втримується від проворота, тому при русі поршня гайка 8 переміщається тільки уздовж осі й викликає обертання гвинта 7, що встановлений на підшипниках у кришці Ц. Від гвинта 7 обертання передається через шестірні 6, 5, 4 і шлицєву муфту 3 гвинту 2. Гвинт ввертається в гайку / або вивертається з її, зміщає золотник РДР убік середнього положення. У такий спосіб здійснюється зворотний зв'язок по положенню усередині гідравлічного привода, що стежить, між поворотом гайки / (вхід) і переміщенням штока гідроциліндра (вихід). Після відпрацьовування заданої програми вал ШД зупиняється, шток гідроциліндра «відпрацьовує» неузгодженість, золотник розподільника РДР приходить у середнє по-ложення й шток зупиняється в певнім положенні. Якщо під дією зовнішнього навантаження шток буде прагнути зміститися із цього положення, то через зворотний зв'язок це викличе зсув золотника. Це приведе до появи на поршні додаткового гідравлічного зусилля, спрямованого убік, протилежну зсуву штока, тобто на втримання штока в заданому положенні. Дискретність переміщення штока (ціна імпульсу) залежить від співвідношення кроку передачі пристрою, що порівнює, «гайка / -гвинт 2», кроку (при многозаходной різьбленню - ходу) гвинтової передачі зворотного зв'язка «гайка 8 - гвинт 7» і передатного відношення зубчастої передачі у зворотному зв'язку. У серійних приводах типу Г 28-2 при кутовому кроці ШД в 1,5° дискретність переміщення штока залежно від комбінації шестірень 4...6 становить 0,05 або 0,1 мм. Розглянемо конструкцію ЛЭГШП типу Г 28-2. Що Задає ШД 1 з'єднується із вхідним валиком дроселюючого розподільника й гайкою 2 через повідкову муфту. Гайка встановлена в радіально-упорних підшипниках і зафіксована від осьового зсуву. Різьблення на гвинті 3 і в гайці 2 виконана з високою точністю, що забезпечує осьовий зазор у цій передачі не більше 0,01 мм. Гвинт 3 проходить усередині золотника 4 і пов'язаний з ним через упорні підшипники 7. Осьовий зазор між гвинтом і золотником вибирається зусиллям пружини. У корпусі 5 розподільника запресована втулка 6 з розточеннями й радіальними каналами для проходу масла. Золотник 4 і втулка 6 виготовлені із загартованої сталі, їх взаємно сполучені робітники поверхні виконані з високою точністю. На правому кінці гвинта 3 установлена втулка 8 із внутрішніми шліцами, через які вона з'єднує гвинт із валиком 10, установленим на підшипниках у корпусі 9. На валику жорстко закріплена шестірня 11. Проміжна шестірня 12 вільно обертається на своїй опорі. Шестірня 13 жорстко закріплена на гвинті зворотного зв'язка 16. Зсувом опори проміжної шестірні вибирають зазори в зубчастій передачі. Гвинт 16 установлений на радіально-упорних підшипниках у корпусі 9 і не має осьового зазору завдяки попередньому затягуванню підшипників. Гайка 14 із трехзаходной різьбленням виконане із двох напівгайок із прокладкою між ними. Пригоном прокладки по товщині до мінімума зменшується осьовий зазор у несамогальмівній гвинтовій передачі зворотного зв'язка. Гвинт 16 входить внутрь порожнього штока 17, жорстко з'єднаного з поршнем 15. Канали для приєднання привода до гідросистеми виконані в корпусі 5 дроселюючого розподільника (не показаний). Канал підведення з'єднується із середньою проточкою втулки 6, канал зливу — із двома крайніми проточками, а дві середні проточки через канали в корпусах 5 і 9 і трубу між корпусом 9 і передньою кришкою циліндра з'єднуються з порожнинами циліндра. Приводи виготовляють із декількома варіантами кріплення: фланцевого, на цапфах або лабетах. Валик 10 жорстко зв'язаний через механізм зворотного зв'язка з переміщенням штока, завдяки чому до цього валика можна приєднувати при необхідності електричні датчики положення або швидкості руху вихідної ланки (штока) привода. У промислових роботах зі ЧПУ вантажопідйомністю понад 40 кг для обслуговування верстатів ЭГП є основним типом привода. У ПР портального типу, призначених для групового обслуговування верстатів по одній з координат, потрібно забезпечити переміщення каретки довжиною до 18 м, точність позиціонування в трохи десятих часток міліметра при максимальній швидкості переміщення 1,2 м/с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.