Рис. 9 - Схема передаточной функции соленоида
Т5=0,02;T6=0,007;T7=0,02; T8=0,0028; К2=0,8; золотник (рис.10) и насос-мотор (рис.11) в которых соответственно T3=0,000127; T4=0,001479; КЗ=10,1 и T1=0,000127;T2=0,001479;
КНГ=1]. Пользуясь программой MATLAB Simulink собираю структурную схему (рис.12) и получаю график переходного процесса (рис.13).
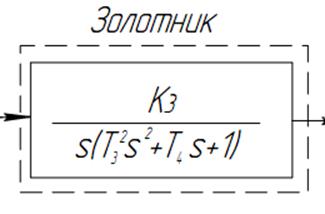
Рис. 10 – Схема передаточной функции золотника
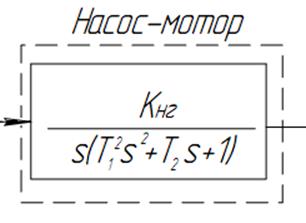
Рис.11 – Схема передаточной функции системы «насос-мотор»
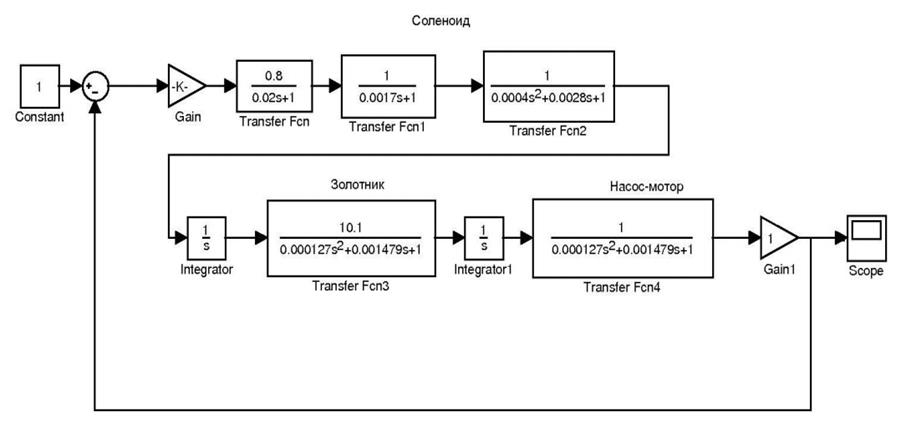
Рис. 12 - Структурная схема переходного процесса
Рис. 13 – График колебательного расходящегося переходного процесса
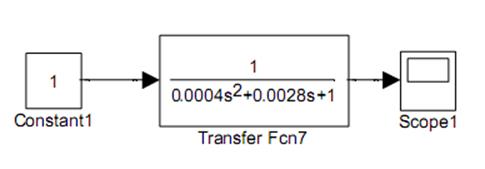
Рис. 14 – Структурная схема звена ![]()
Рис.
15 – график переходного процесса звена ![]()
Звено ![]() описывается дифференциальным
уравнением, что и апериодическое звено второго порядка. Корни этого уравнения
комплексные, что соответствует условию
описывается дифференциальным
уравнением, что и апериодическое звено второго порядка. Корни этого уравнения
комплексные, что соответствует условию ![]() Определяю частоту свободных
колебаний по формуле согласно [1]
Определяю частоту свободных
колебаний по формуле согласно [1]
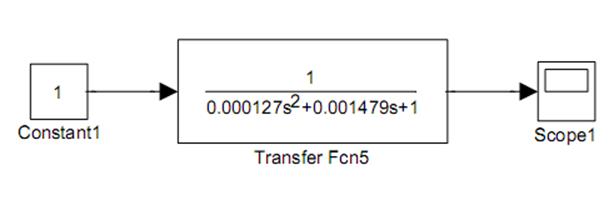
Рис. 16 – Структурная схема переходного процесса звена
![]()
Рис.
17 – График переходного процесса звена ![]()
Звено ![]() описывается дифференциальным
уравнением, что и апериодическое звено второго порядка. Корни этого уравнения
комплексные, что соответствует условию
описывается дифференциальным
уравнением, что и апериодическое звено второго порядка. Корни этого уравнения
комплексные, что соответствует условию ![]() Определяю частоту свободных
колебаний по формуле согласно[1]
Определяю частоту свободных
колебаний по формуле согласно[1]
Определяю сопрягающие частоты по формуле согласно [1]

Прологарифмируем их
![]()
Определяем коэффициент передачи ![]()
![]() .
.
Для построения Л.А.Х. находится величина Lo(отмечаю точку на Л.А.Х. приложение 1)
![]()
Построение располагаемой Л.А.Х. начинаю
из точки Lo, провожу прямую под
углом -40дб/дек, т.к. в схеме имеется два интегратора до первой частоты (в
данном случае ![]() ). Увеличиваю угол наклона на
-40дб/дек и провожу линию до частоты
). Увеличиваю угол наклона на
-40дб/дек и провожу линию до частоты![]() . Т5 в первой степени, поэтому
увеличиваю угол наклона еще на -20дб/дек и провожу линию до частоты
. Т5 в первой степени, поэтому
увеличиваю угол наклона еще на -20дб/дек и провожу линию до частоты ![]() . Увеличиваю угол наклона еще на
-80дб/дек и провожу линию до частоты
. Увеличиваю угол наклона еще на
-80дб/дек и провожу линию до частоты ![]() Т6 в первой степени, значит
увеличиваю угол наклона еще на -20дб/дек.
Т6 в первой степени, значит
увеличиваю угол наклона еще на -20дб/дек.
При построении желаемой характеристики
необходимо чтобы порядок передаточной функции был не ниже порядка разомкнутой
системы. Задаюсь параметрами tp=3с
– время регулирования, ![]() - перерегулирование. Определяю
- перерегулирование. Определяю ![]() согласно [1]
рис.12.3 по формуле
согласно [1]
рис.12.3 по формуле
Далее по найденной частоте
положительности ![]() определяю частоту среза Л.А.Х.
так, чтобы она удовлетворяло условию согласно [1]
определяю частоту среза Л.А.Х.
так, чтобы она удовлетворяло условию согласно [1]
![]()
Прологарифмируем ![]() :
:
![]() (отмечаю точку на Л.А.Х.
приложение 1)
(отмечаю точку на Л.А.Х.
приложение 1)
Построение желаемой Л.А.Х. начинаю из точки ![]() , через которую провожу прямую под
наклоном -20дб/дек. Среднечастотный участок образованный асимптотой с наклоном
-20дб/дек служит для обеспечения устойчивости, и для обеспечения заданных
показателей качества. Этот участок проводится влево и вправо до достижения
модулей, равных
, через которую провожу прямую под
наклоном -20дб/дек. Среднечастотный участок образованный асимптотой с наклоном
-20дб/дек служит для обеспечения устойчивости, и для обеспечения заданных
показателей качества. Этот участок проводится влево и вправо до достижения
модулей, равных ![]() Затем произвожу сопряжение
среднечастотного участка с низкочастотными асимптотами и высокочастотной
частью.
Затем произвожу сопряжение
среднечастотного участка с низкочастотными асимптотами и высокочастотной
частью.
![]() Если желаемая передаточная
функция разомкнутой системы
Если желаемая передаточная
функция разомкнутой системы ![]() ,
, ![]() - располагаемая и передаточная
функция корректирующего устройства последовательного типа
- располагаемая и передаточная
функция корректирующего устройства последовательного типа ![]() , то можно записать равенство
согласно [1]
, то можно записать равенство
согласно [1]
![]() отсюда
отсюда
Для Л.А.Х. можно записать согласно[1] из ординат желаемой Л.А.Х. вычитаю ординаты располагаемой Л.А.Х. Получившаяся Л.А.Х. соответствует передаточной функции последовательного корректирующего звена.
![]()
В качестве корректирующего устройства
использую дифференцирующее звено первого порядка ![]() .
.
Вставляю корректирующее устройство в схему (рис. 18) и получаю график сходящегося переходного процесса.
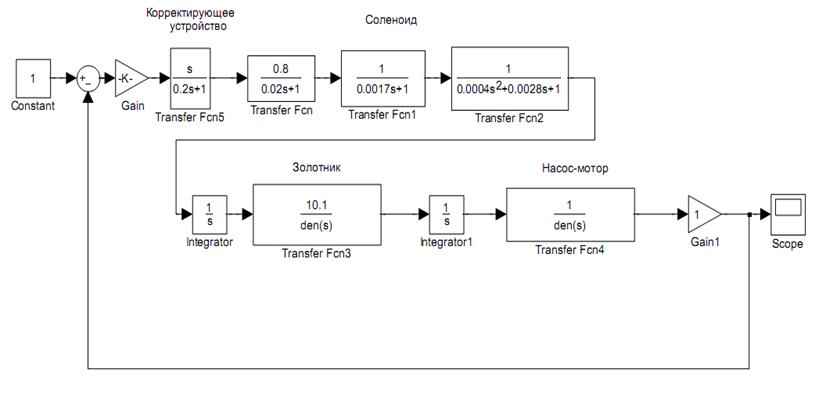 Рис. 18 –
Структурная схема с корректирующим устройством
Рис. 18 –
Структурная схема с корректирующим устройством
Рис. 19 - График переходного процесса с корректирующим устройством
АНАЛИЗ КАЧЕСТВА СИСТЕМЫ
Рис. 20 – График переходного процесса с определенными показателями качества.
Перерегулирование:

Время переходного процесса:
![]() – время от момента
воздействия, начиная с которого колебания управляемой величины не превышают 5%
зону.
– время от момента
воздействия, начиная с которого колебания управляемой величины не превышают 5%
зону.
Ошибка: пользуясь программой MATLAB,
я в схему после сумматора вставляю блок Display
и получаю значение ![]() , близкое к нулю.
, близкое к нулю.
Выводы: я освоил методику расчета динамики гидропривода с гидромотором,
составления математической модели системы и реализации её в программе MATLAB,
расчета последовательного корректирующего устройства методом ЛАЧХ (график
переходного процесса стал устойчивым) и анализа показателей качества системы
(время переходного процесса 1с, перерегулирование 3%, хотя задавались значением
15%, уложились в заданный параметр, что неплохо, ошибка ![]() - число близкое к нулю, т.к. в
системе имеются интегрирующие звенья, которые входят в общую передаточную
функцию, значит, что установившееся ошибка равна 0. Системы, у которых
статическая ошибка равна 0 называются астатическими.
- число близкое к нулю, т.к. в
системе имеются интегрирующие звенья, которые входят в общую передаточную
функцию, значит, что установившееся ошибка равна 0. Системы, у которых
статическая ошибка равна 0 называются астатическими.
Перечень ссылок
1. Бесекерский В.А. Теория систем автоматического управления. Изд. 4-е перераб. и доп.- СПб. Изд. «Профессия».- 2003г.-752с.
2. Гидравлические системы управления / Э. Льюис, Х. Стерн ; пер. с англ. А. М. Банштыка, А. М. Плунгяна ; под ред. И. М. Крассова. - М.: Мир, 1966. - 407 с.: ил. - Библиогр.: с. 385
3. Финкельштейн З.Л. Применение и очистка рабочих жидкостей для горных машин. – М.: Недра, 1986. – 232с.
4. Башта Т.М. Объемные гидравлические приводы. – М.: Машиностроение, 1968. – 628с
5. Финкельштейн З.Л. Расчет, проектирование и эксплуатация объемного гидропривода: Учеб. пособие – 2006.-216с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.