Содержание.
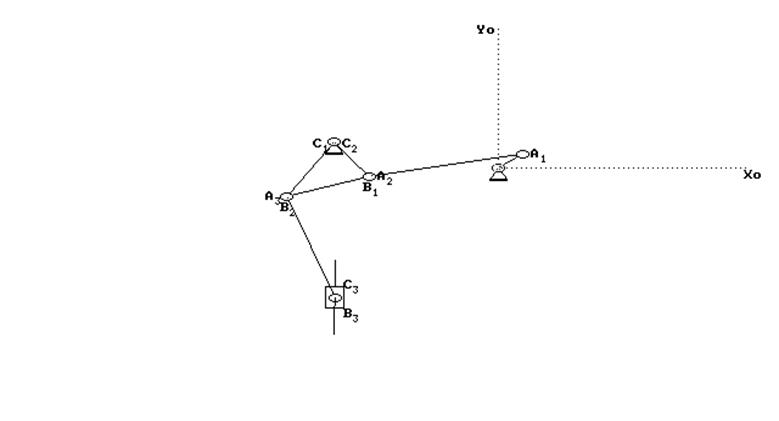
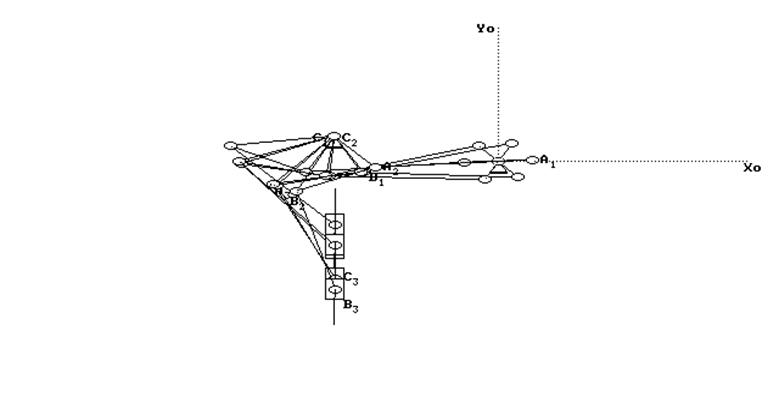
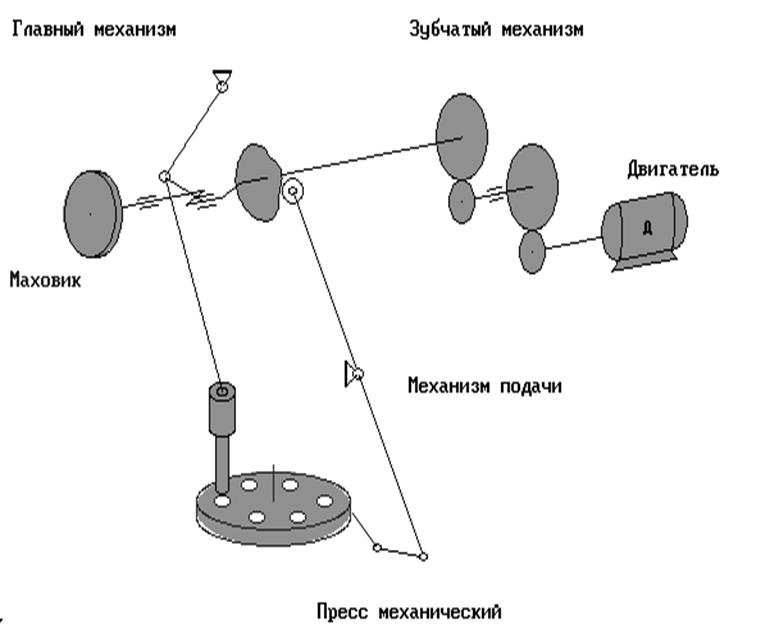
Структурная схема механизма. 2
Аналитическая проверка работоспособности механизма. 4
Кинематика. 4
Расчет скоростей методом планов. 5
Расчет ускорений методом планов. 6
Расчет приведенного момента нагрузки. 7
Расчет инерционной механической системы. 9
Механическая система в окончательном виде. 10
Заключение. 14
Механизмы - это система тел, предназначенная для преобразования движения.
Преобразующие механизмы.
Служат для преобразования движения из вращательного в поступательное.
Звено – материальное тело, состоящие из одной или нескольких деталей.
Кинематическая пара– подвижное соединение двух звеньев.
Кривошип – звено, поворачивающееся на 3600.
Размеры звеньев (см) Вес звеньев (кг)
|
Вариант |
Альфа, (град) |
xc |
yc |
Абцисса Точки Е |
OA |
AB |
BC |
CD |
DB |
DE |
Частота |
OA |
AB |
BCD |
DE |
E |
Сила F |
|
1 |
45 |
-33 |
9 |
-33 |
7 |
32 |
14 |
18 |
21 |
35 |
185 |
0.8 |
3.6 |
6 |
2.8 |
3 |
110 |
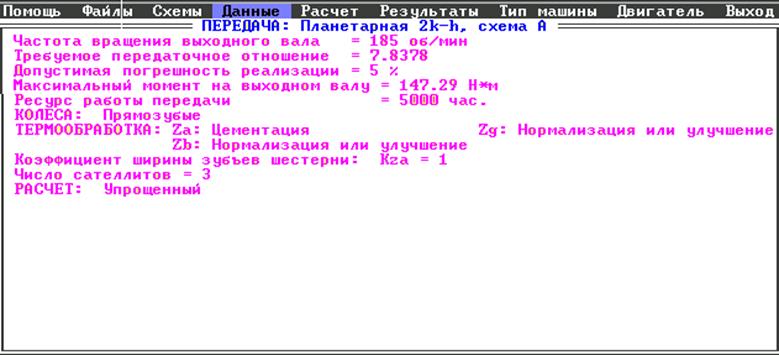
Ввод данных:
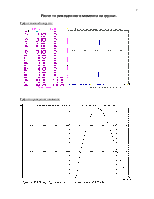
Схема 1
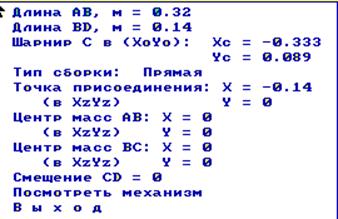
Схема 2
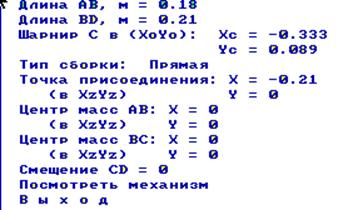
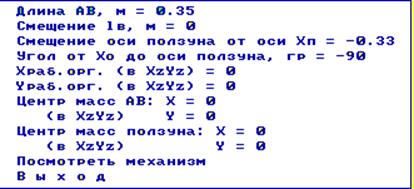
Схема 3
Шесть положений механизма
Рассчитаем работоспособность механизма по формуле Чебышева:
W = 3·m – 2p1 , где W – степень подвижности, р1 – число одноподвижных кинематических пар
m – число подвижных звеньев
W = 3·7 – 2·10 = 21 – 20 = 1
Механизм работоспособен.
Угол поворота кривошипа, соответствующий дальнему положению ползуна φдал. .=5,2690
Угол поворота кривошипа, соответствующий ближнему положению ползуна φбл. .=185,850
Рассчитаем угол поворота кривошипа, соответствующий перемещению ползуна из дальнего положения к ближнему:
φ хх = φбл. - φдал.
φхх =185,850 – 5,2690 = 180,5810
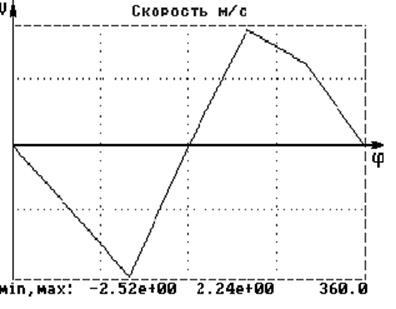
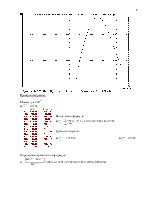
Таблица результатов компьютерного расчета:
Проверочный расчет:
Расчеты ведутся для 2400
ω=19,3732
VA=1,3561м/с
k =22,6
VAB=0,7458 м/с
VBD=1,1752 м/с
VDE=0,7232 м/с
VBC=1,0622 м/с
VDC=1,3786 м/с
VE=2,3499 м/с
 =(2,3499-2,238)/2,238*100%=5,1%
=(2,3499-2,238)/2,238*100%=5,1%
Таблица результатов компьютерного расчета:
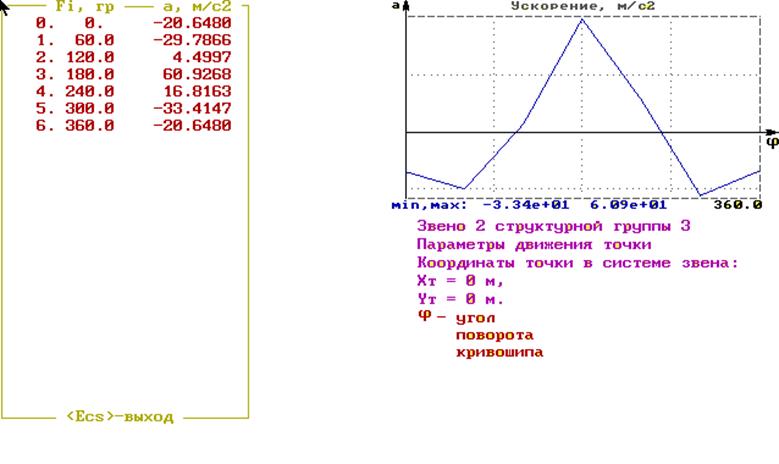
Проверочный расчет:
Расчеты ведутся для 2400
aA=26,2715 м/с2
k=525,43
aAB1=1,738 м/с2
aCB2=8,059 м/с2
aBD2=6,5766 м/с2
aCD1=10,5585 м/с2
aDE1=1,4943 м/с2
aE=17,795 м/с2
 =(17,795-16,82)/16,82*100%=5,8%
=(17,795-16,82)/16,82*100%=5,8%
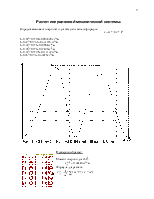
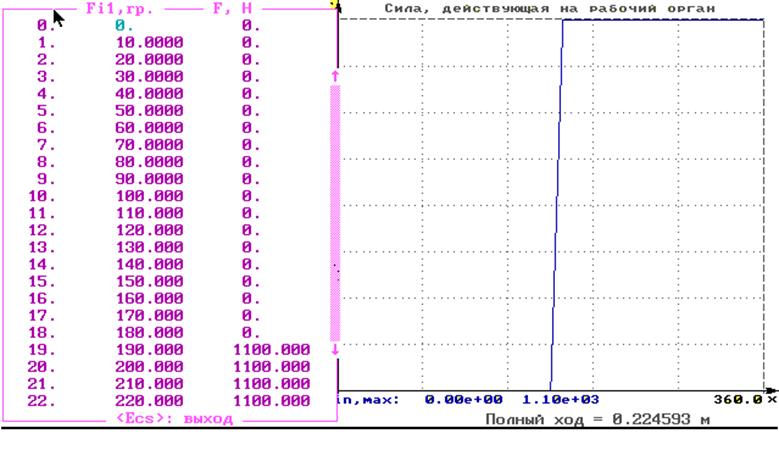
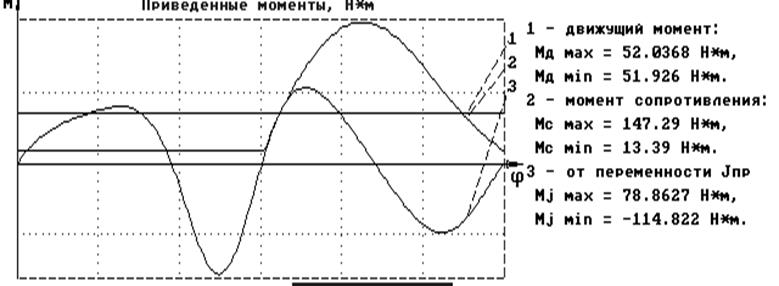
График внешней нагрузки:
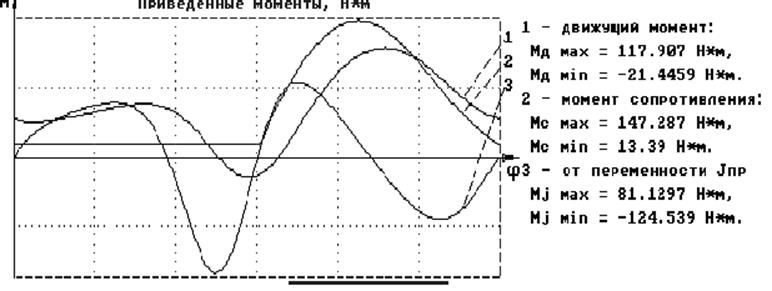
Графики приведенного момента:
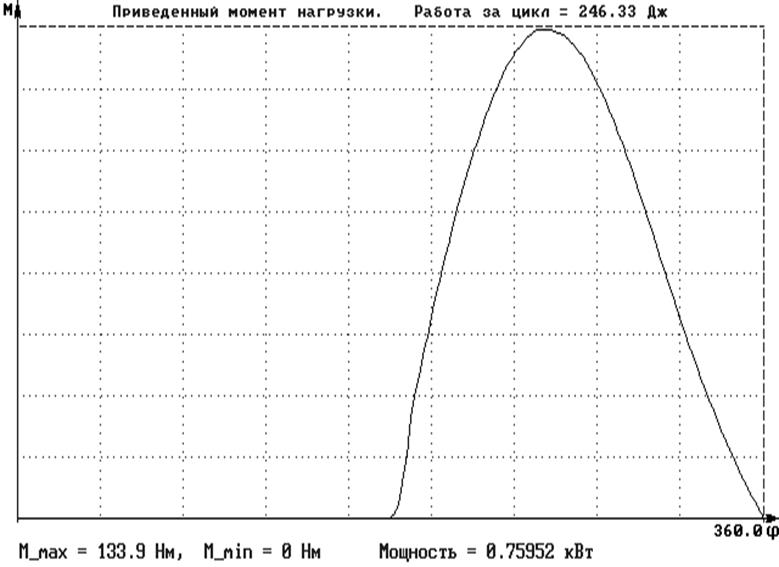
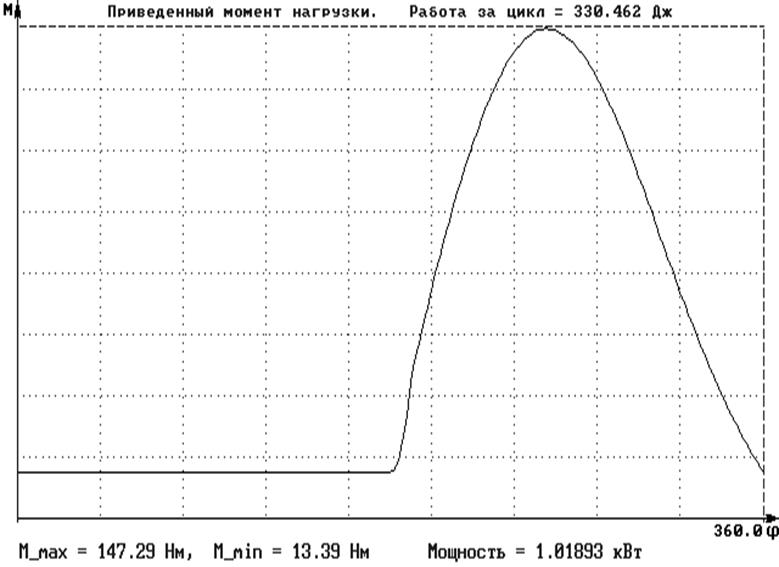
Проверочный расчет:
Момент для 2400
![]() 127,03
127,03
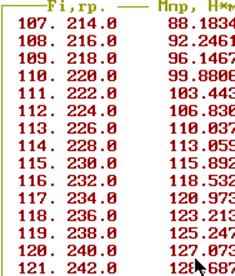
Вычислим по формуле:
 ) = 1/19,3732*2461,8=127,07
) = 1/19,3732*2461,8=127,07
Сравнив, получили:
![]() 127,073
127,073
![]() 127,07
127,07
Определим погрешность по формуле:
 =(127,07-127,073)/127,073*100%=0,00236%
=(127,07-127,073)/127,073*100%=0,00236%
Определяем момент инертности для каждого звена по формуле:
J = m * (0.3 * l)2
J= 0,072*0,9*0,8=0,003528 кг2*м
J=0,322*0,9*3,6=0,331776 кг2*м
J= 0,142*0,9*6=0,10584кг2*м
J= 0,182*0,9*6=0,17496кг2*м
J= 0,212*0,9*2,8=0,111132кг2*м
J=0,352*0,9*3=0,33075кг2*м
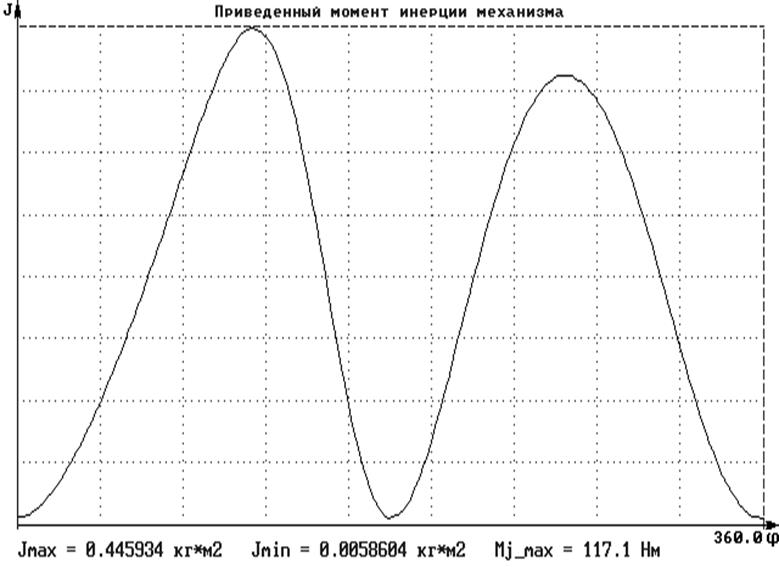
Проверочный расчет:
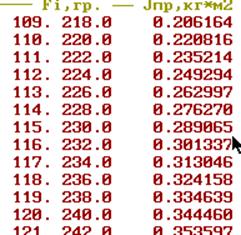
Момент инерции для 2400.
![]() = 0,34446кг2*м
= 0,34446кг2*м
Формула для расчета:
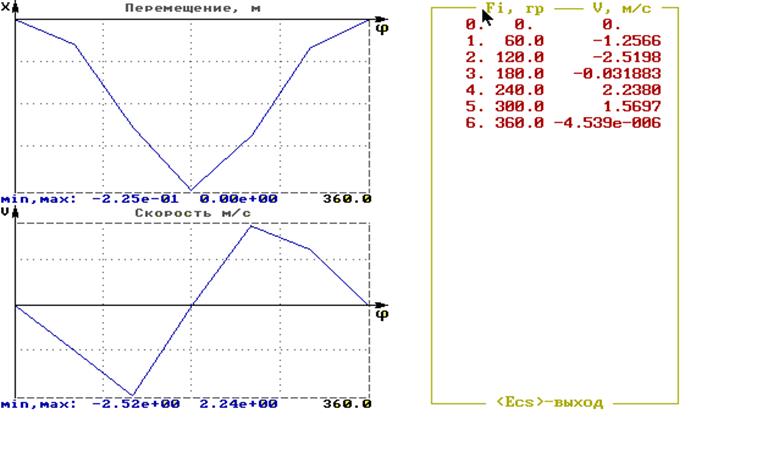
m1=0,8 кг V1=-1.2566 м/с
m2=3,6 кг V2=-2,5198 м/с
m3=6 кг V3=-0,031883 м/с
m4=6кг V4=2,2380 м/с
m5=2,8 кг V5=1,5697 м/с
m6=3кг V6=-4,599*10-6 м/с
![]() =1/19.37322*122.947=0,32758
кг2*м
=1/19.37322*122.947=0,32758
кг2*м
Получили: ![]() = 0,32758 кг2*м
= 0,32758 кг2*м
Определим погрешность
 =(0.32758-0,34446)/0,34446=4,9%
=(0.32758-0,34446)/0,34446=4,9%
Результаты компьютерного расчета:
Проверочный расчет:
Рассчитаем передаточное отношение:  =1450/185=7,837
=1450/185=7,837
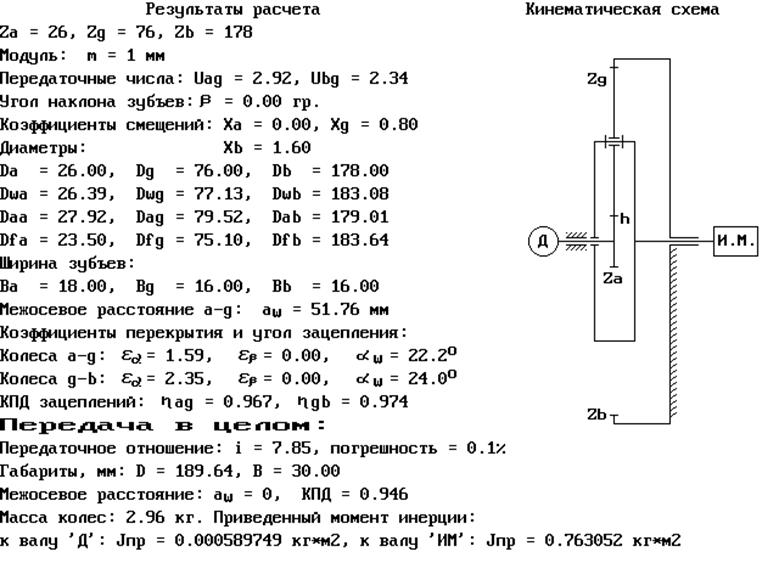
Геометрические размеры передаточного механизма:
Модуль: m = 1 мм.
Число зубьев: Za = 26 Zg =76 Zb =178
.
Диаметры делительных окружностей:
dWa = m*Za =1*26=26 мм
dWg = m*Zg = 1*76=76 мм
dWb = m*Zb = 1*178=178 мм
Окружности впадин:
dfa = m*(Za - 2.5) = 1*(26-2,5)=23,5 мм
dfg = m*(Zg - 2.5) = 1*(76-2,5)=73,5 мм
dfb = m*(Zb - 2.5) =1*(178-2,5)=175,5 мм
Окружности выступа:
daa = m*(Za + 2) =1*(26+2)=28 мм
dag = m*(Zg + 2) =1*(76+2)=78 мм
dab = m*(Zb + 2) = 1*(178+2)=180 мм
Межосевое расстояние:
aag
= = 0.5*m*(Za+Zg) = 0,5*1*(26+76)=51 мм
= 0.5*m*(Za+Zg) = 0,5*1*(26+76)=51 мм
Результаты совпадают.
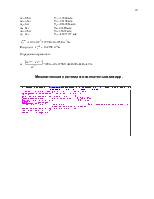
График изменения угловой скорости:
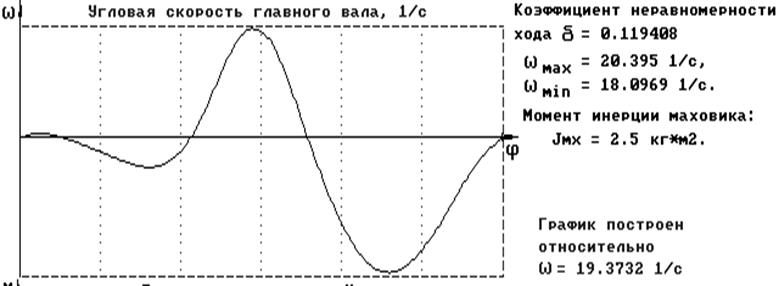
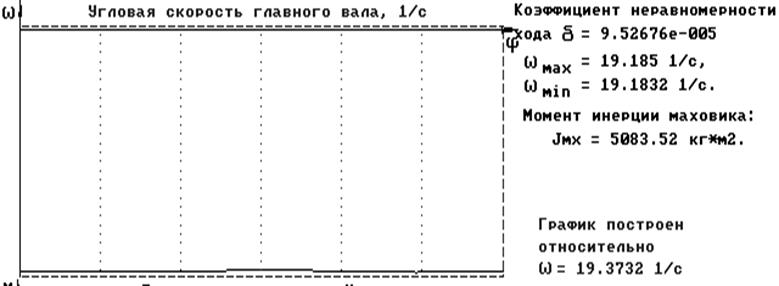
Механическая система в окончательном виде:
В ходе работы была выполнена главная задача: был подобран передаточный механизм и обеспечена его работоспособность.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.