|
|
; • До каких пор (сколько раз) должна повторяться операция ; вращения? ,;. • Какой угол лучше установить для поворота?
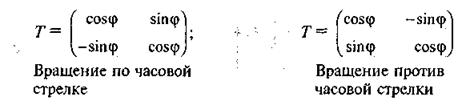
Наиболее простым является ортогональное вращение. Оно производится умножением матрицы факторных нагрузок на некоторую ортогональную матрицу Т, задающую угол поворота, размерностью г х г по числу общих факторов. Поворот может задаваться по или против часовой стрелки, например для матрицы факторных нагрузок А с числом общих факторов г = 2:
Если матрица факторных нагрузок содержит данные более чем по двум латентным факторам, строится несколько матриц преобразования Т для всех парных комбинаций факторов. Так, для трехмерной матрицы А будут использоваться три матрицы преобразования Т.
вращение против часовой стрелки:
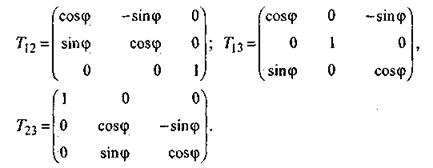
Полная матрица преобразования для трехмерного случая будет: Т= Т]2х 71 з х /23- Этот подход обобщается на случай, когда число общих факторов г > 3, для четырехмерной матрицы А полная матрица преобразования Т будет произведением уже шести матриц вращения, для всех пар общих факторов:
Т = 712 х 71 з х 714 х Т23 х Т2Л х Т34 и т. д.
При условии ортогонального вращения всегда 7" Т — Б.
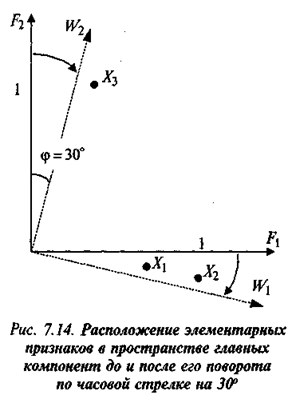
Пример 7,6. Выполним однократный поворот двумерной матрицы факторных нагрузок, полученной методом главных компонент (п. 7.4.2). Пусть угол поворота будет равен 30° U<p =30°):
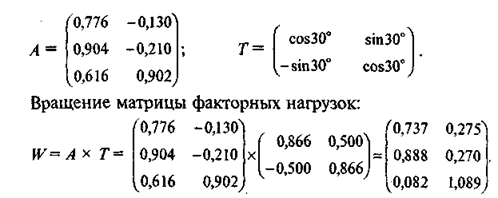
В результате вращения получена матрица факторных нагрузок, интерпретируемая проще исходной. В составе первой главной компоненты заметно определяющее значение признаков: ai, Х2, во второй — Х3. Одновременно выполняется требование АА' = WW. После перемножения нормированное пространство искажено, т.е. появляются элементы, большие единицы, и не обязательно ^wjr = "kj . Чтобы вернуться к принятым пространственным соотношениям, достаточно нормализовать матрицу Wno известному правилу: векторы И7—матрицы факторного отображения
W,
после поворота W, = ——,
Wj
Построим график с исходным положением пространства главных компонент до и после поворота. В пространстве главных компонент точками показаны элементарные признаки JTb Хъ Х3 (рис. 7.14).
Косоугольное вращение матрицы факторных нагрузок может проводиться поочередным вращением каждого фактора на определенный угол или одновременным вращением всех факторов посредством умножения исходной матрицы нагрузок А на неор-
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.