



Комбинаторные методы в своей основе исходят из конечности числа планов задачи, используют ее комбинаторный характер. В основе лежит идея не полного, а частичного перебора планов задачи. Т.е. при решении не рассматриваются некоторые подмножества вариантов, заведомо не дающих оптимума. Перебираются лишь те оставшиеся варианты, которые в определенном смысле являются перспективными. В отличие от методов отсечений, комбинаторные методы значительно меньше подвержены влиянию ошибок округления. Далее комбинаторные методы (большинство) не используют решение задачи линейного программирования, в которую могла бы быть погружена дискретная задача. Комбинаторные методы отличаются от методов отсечений более простой арифметикой, обладают более сложной логикой ветвления решения. Наибольшую чувствительность комбинаторные методы проявляют к размерности задачи. Количество вычислений быстро возрастает при увеличении размерности. Пожалуй, одним из достоинств комбинаторных методов является то, что нет необходимости в доказательстве их конечности, она бывает очевидна из существа задачи.
Центральное место среди комбинаторных методов занимают методы, общими для которых является идея метода “ветвей и границ”.
Конкретизация динамического программирования для ряда специфических дискретных задач тоже представляет собой комбинаторные методы (методы направленного перебора). Различные методы последовательных расчетов.
Наиболее подробно остановимся на методе ветвей и границ, особенно, алгоритме Литла, Сунни, Мурти и Кэрел для задачи о коммивояжере.
Впервые метод ветвей и границ был предложен в 1960г. в работе Лэнд и Дойг для задачи целочисленного линейного программирования. Затем она была несколько забыта и возродилась в 1965г. в работе Литла, Сунни, Мурти и Кэрела для задачи о коммивояжере. Здесь и появилось название ветвей и границ.
Идея метода ветвей и границ.
Рассматривается задача дискретного программирования:
![]()
при ![]() .
.
G – конечное множество (некоторое).
В основе метода ветвей и границ лежат следующие построения, которые в ряде случаев позволяют существенно снизить объем перебора.
I. Вычисление нижней границы (оценки).
Часто удается найти нижнюю границу
(оценку) целевой функции f на множестве планов G (или на
некотором подмножестве G’), т.е.
такое число x(G) (или x(G’)),
что для ![]() имеет место
имеет место
![]()
соответственно для ![]() будет
будет ![]()
II. Разбиения на подмножества (ветвление).
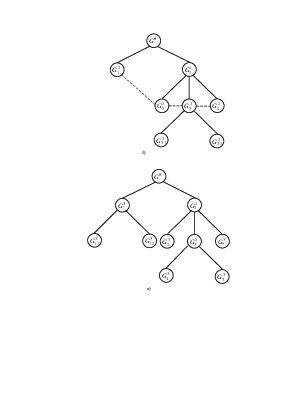
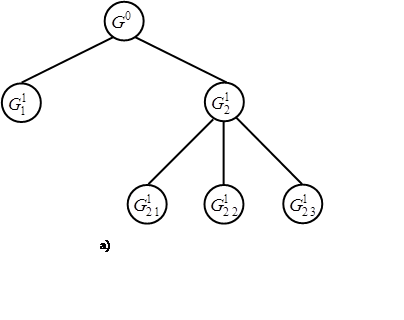
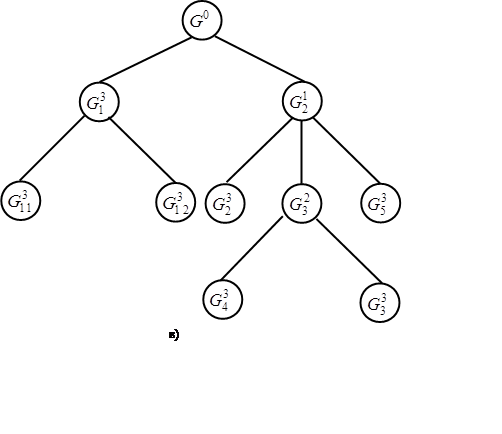
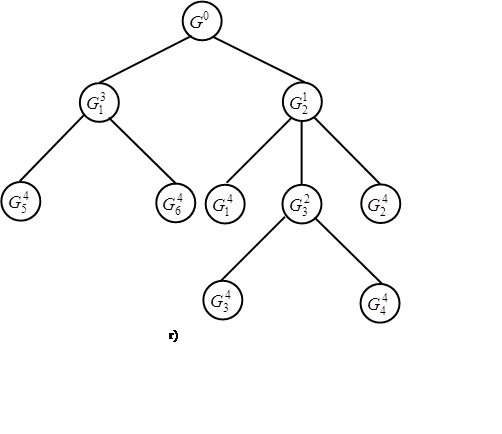
Реализация метода связана с постепенным разбиением множества планов G на дерево подмножеств (ветвлением). Ветвление происходит по следующей многошаговой схеме.
Начальный 0–й шаг. Имеется множество G0 = G. Некоторым способом оно разбивается на конечное число (обычно не превосходящее подмножеств G11, G21 ,…, Gr11).
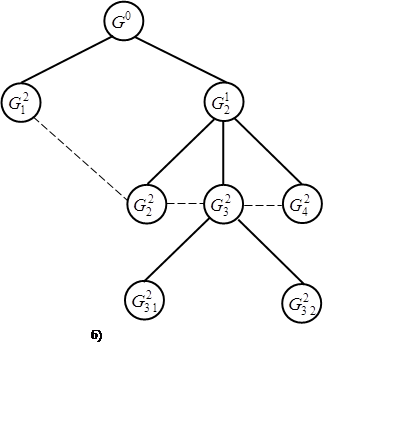
k–й шаг ( k > 0). Имеются множества G1k, G2k ,…, Grkk, еще не подвергавшиеся ветвлению. По некоторому правилу среди них выбирается наиболее перспективное множество Gn(k)k и разбивается на конечное число подмножеств:
![]()
Еще не подвергавшиеся разбиению множества
![]()
заново обозначаются через
![]()
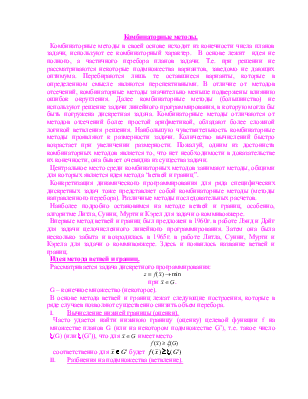
Схематично такой процесс можно представить следующим образом:
 |
 |
 |
 |
III. Просчет оценок.
Если множество G1 Ì G2, то, очевидно,
Поэтому, разбивая в процессе решения
некоторое множество G
на подмножества G'1, G'2, …, G's,
всегда будем считать, что оценка (граница) для любого подмножества Gi’ не меньше оценки для множества Gi :
x(G'i) ³ x(G')
В конкретных ситуациях часто оказывается возможным добиться улучшения оценки, т.е. получить хотя бы для некоторых i строгое неравенство
x(G'i) > x(G')
IV. Вычисление планов.
Для конкретных задач могут быть указаны различные способы нахождения планов в последовательно разветвляемых подмножествах. Любой такой способ существенно опирается на специфику задачи.
V. Признак оптимальности.
Пусть  и
план
и
план ![]() принадлежит некоторому подмножеству Gn.
принадлежит некоторому подмножеству Gn.
Если при этом
![]() , i = 1, 2,…, s.
, i = 1, 2,…, s.
то ![]() оптимальный план задачи 1 – 2. (Доказательство
непосредственно следует из определения оценки).
оптимальный план задачи 1 – 2. (Доказательство
непосредственно следует из определения оценки).
Обычно этот признак применяется на некотором этапе ???????
VI. Оценка точности приближенного решения.
Пусть ,
Если ![]() некоторый
план исходной задачи (т.е.
некоторый
план исходной задачи (т.е. ![]() ),
то
),
то
![]()
(Доказательство следует из определения оценки).
Очевидно, что если разность ![]() невелика,
то
невелика,
то ![]() можно принять за приближенное решение, а D – за оценку точности приближения.
можно принять за приближенное решение, а D – за оценку точности приближения.
Формально схема метода “ветвей и границ” описывается следующим образом:
0 – шаг. Вычисляем оценку ![]() .
Если при этом удается найти такой план
.
Если при этом удается найти такой план ![]() , что
, что
![]()
то ![]() –
оптимальный план.
–
оптимальный план.
Если оптимальный план не найден, то по некоторому способу разбиваем множество G = G0 на конечное число подмножеств
![]()
и переходим к 1–му шагу.
1 – шаг. Вычисляем оценки ![]() , i = 1, 2,…, r1. Если при этом удается найти такой план
, i = 1, 2,…, r1. Если при этом удается найти такой план ![]() , что
, что
![]() для некоторого r (1 £ r £ r1) и
для некоторого r (1 £ r £ r1) и
![]() , i = 1, 2,…, r1.
, i = 1, 2,…, r1.
то ![]() –
оптимальный план.
–
оптимальный план.
Если же оптимальный план не найден, то выбираем “наиболее перспективное“ для дальнейшего разбиения множество ![]() по следующему правилу
по следующему правилу
Разбиваем множество ![]() на
несколько (обычно не пересекающихся) подмножеств:
на
несколько (обычно не пересекающихся) подмножеств: ![]() ??????????
??????????
Еще не подвергающиеся разбиению множества
![]()
заново обозначим через
![]()
и переходим к 2 – му шагу.
k – шаг. (k ³ 2).
Вычисляем оценки ![]() , i = 1, 2,…, rk. Если при этом удается найти такой план
, i = 1, 2,…, rk. Если при этом удается найти такой план
![]() , что
, что ![]() для
некоторого r
(1 £ r £ rk) и
для
некоторого r
(1 £ r £ rk) и
![]() , i = 1, 2,…, rk.
, i = 1, 2,…, rk.
то ![]() –
оптимальный план.
–
оптимальный план.
Если же оптимальный план не найден, то снова выбираем “наиболее перспективное“ множество ![]() по
следующему правилу
по
следующему правилу
Разбиваем множество ![]() на
несколько (обычно не пересекающихся) подмножеств:
на
несколько (обычно не пересекающихся) подмножеств: ![]()
Еще не подвергающиеся разбиению множества
![]()
заново обозначим через
![]()
и переходим к (k + 1) – му шагу.
Для реализации этой схемы методы ветвей границ для конкретных задач дискретного программирования, исходя из особенностей этих задач
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.