























математической модели конечным числом возможных пар { (F1 i , F2 i ), i=1,..., k }, основываясь на физических соображениях или по соображениям эвристического характера. Задача идентификации модели заключается в выборе среди возможных пар функций подходящей пары и в последующем оценивании соответствующего вектора параметров q в выбранной паре.
Пусть некоторый процесс характеризуется наблюдаемыми переменными: m-мерным выходным вектором отклика y и входным l1-мерным вектором факторов u. Будем полагать, что последовательность факторов (управляющих воздействий) {u(t), t =0, 1,..., N-1} измеряется без случайных помех, таким образом, управление детерминировано.
В общем случае, дискретная линейная модель описывается стохастическим разностным уравнением:
 (2.2)
(2.2)
в котором динамическое поведение y(t) целиком определяется его прошлыми значениями, прошлыми значениями управляющего вектора u и вектором возмущений z (t), не зависящим от прошлых значений управляющих и выходных сигналов.
Вектор y(t), размерности l2, составлен из описывающих детерминированный тренд функций, которые при построении модели процесса считаются полностью известными. Подходящие детерминированные функции времени обычно подбираются в результате просмотра эмпирических данных и их характеристик, а также применения процедур проверки гипотез.
Вектор-функции ![]() , полагают детерминированными и полностью
известными. Часто
полагают функции равными:
, полагают детерминированными и полностью
известными. Часто
полагают функции равными: ![]() .
.
Поскольку эти функции могут быть нелинейными, уравнение (2.2) нелинейное по входящим в него наблюдениям, но линейно по параметрам – элементам матриц Aj (j=1,..., m1 ), Gj (j=1,..., m3), F.
Обозначив оператор единичной задержки D, D( y( t) ) = y( t- 1 ), уравнение авторегрессионного процесса (2.2) с использованием матричных многочленов можно записать в компактной форме:
![]() (2.3)
(2.3)
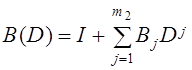
где
 . (2.4)
. (2.4)
Возмущения z(×) в некоторых случаях можно предполагать последовательностью независимых случайных величин, при таком подходе (2.3) описывает авторегрессионную модель. Однако, такое предположение в некоторых ситуациях может не выполняться. Поэтому в более общем случае, принимают предположение, что z (t) - процесс с нулевым математическим ожиданием и конечным временем корреляции:
![]() , который можно описать процессом в виде скользящего среднего:
, который можно описать процессом в виде скользящего среднего:
 , (2.5)
, (2.5)
где
 ,
, ![]() , (2.6)
, (2.6)
dij - символ Кронекера. Таким образом, {w(×)} - белая последовательность независимых случайных величин с нулевым средним.
Подставляя представление (2.5) для возмущений z (t) в уравнение процесса (2.3), получаем окончательный вид модели:
![]() (2.7)
(2.7)
с процессом {w(×)} , удовлетворяющим условиям (2.6).
Модель, описываемую уравнением (2.7), будем называть ARMAX-моделью [7], поскольку в ней представлена зависимость значения y(t) от предыдущих значений выходного сигнала (AR-элементы), процесса скользящего среднего (MA- элементы) и от управляющих воздействий (X- элементы).
Уравнение (2.7) можно представить в матричном виде:
![]() , (2.8)
, (2.8)
Векторный параметр q = (q 1 T, q 2 T,..., q mT)T имеет размерность n=m× nz, его составляют вектора qi(i=1,2,...,m)размерности nz. Коэффициенты вектора qi (i=1,2,..., m) представляют собой элементы i-х строк матриц Aj (j=1,..., m1 ), Gj (j=1,..., m3), F, Bj (j= 1,..., m2), то есть параметры, которые явно участвуют в вычислении выходного сигнала yi(t) по формуле (2.7).
Матрица наблюдений Z(t-1) имеет размерность mх(m× nz):
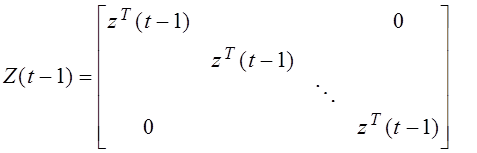 .
.
Вектор-строка zT (t-1) имеет размерность nz =m×m1+l1×m2+l2+m× m3 .
В вектор zT (t-1) объединены наблюдения, необходимые для вычисления yi(t), i=1,2,...,m, по формуле (2.7):
 (2.9)
(2.9)
В случае модели с одним выходом (m=1) уравнение (2.8) принимает вид:
![]() . (2.10)
. (2.10)
Следует заметить, что составить вектор z (t-1) по выражению (2.9) и, следовательно, матрицу z(t-1) для (2.8) возможно только начиная с некоторого момента времени, когда накопятся все необходимые наблюдения. Обозначим этот момент времени nmax: nmax = max (m1, m2, m3) , где m1- число предыдущих значений выходного сигнала («глубина» AR-зависимости), от которых зависит текущее значение y(t); m2 - глубина процесса
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.