


Министерство образования и науки
Московский государственный университет леса
Кафедра УАП ЛПК

Курсовая работа по дисциплине:
«Диагностика и надежность автоматических систем»
Тема: Дискретные системы управления.
Выполнил ст. гр. АП-41:
Проверил:
Москва-2013 г.
Электромеханический разгрузчик с вакуум присосами.
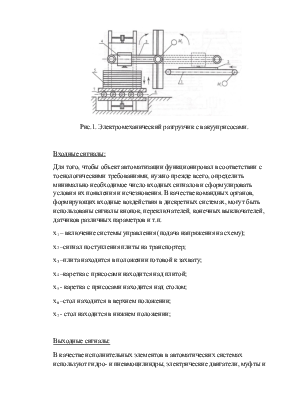
Электромеханический разгрузчик предназначен для автоматической разгрузки щитовых деталей с ленточного транспортера и укладки их в стопу. На рис.1 приведена схема разгрузчика, где: 1- ленточный транспортер; 2-деталь; 3-рама; 4-каретка с вакуумприсосами; 5- стопа деталей; 6-стол с неприводными роликами.
Электродвигатель М1 приводит в движение ленточный транспортер. Электродвигатель М2 служит для поворота рамы 3 с кареткой 4. Электродвигатель М3 служит для поднытия и опускания стола 6.
Исходные положжения механизмов разгрузчика: стол с неприводными роликами находится внизу, каретка с вакуумприсосами расположена над столом, транспортер стоит. Появление детали на ленточном транспортере вызывает его включение. Деталь перемещается ленточным транспортером к разгрузчику. Как только деталь займет нужное положение, трпнспортер остановится и начнется поворот рамы с кареткой и вакуумприсосами к детали. В положении, изображенном на рис.1 пунктиром, рама остановится и к присосам будет подан вакуум. Через некоторое время, достаточное при присасывании детали, рама повернется из положения (1) в полжение (2). В положении (2) вакуумприсосы соединяются с атмосферой, деталь опускается на стол, а стол, в свою очередь, опускается на толщину щита.
Далее цикл работы ленточного транспортера и рамы с кареткой и вакуумприсосами повторяется. По мере подачи деталей высота стопы увеличивается, а стол опускается. Когда будет набрана стопа заданной высоты, стол опустится в нижнее положение – на этом цикл разгрузчика в целом закончен. Для повторения цикла нужно удалить стопу деталей со стола.
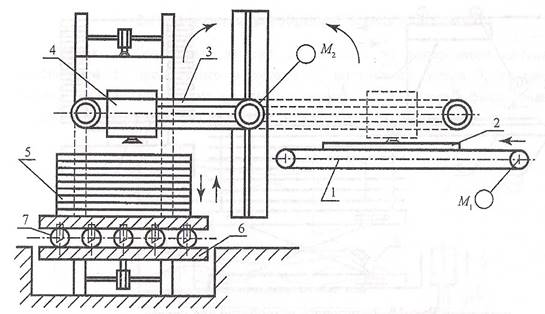
Рис.1. Электромеханический разгрузчик с вакууприсосами.
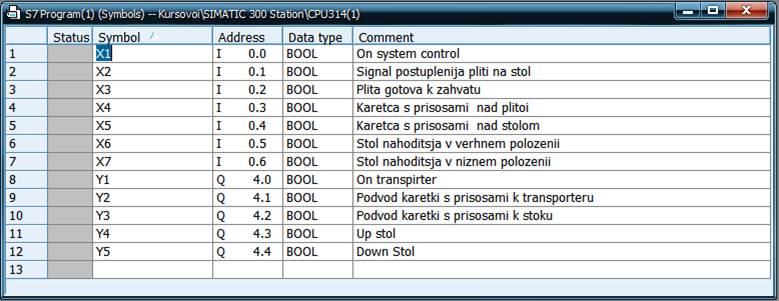
Входные сигналы:
Для того, чтобы объект автоматизации функционировал в соответствии с тоенологическими требованиями, нужно прежде всего, определить минимально необходимое число входных сигналов и сформулировать условия их появления и исчезновения. В качестве командных органов, формирующих входные воздействия в дискретных системах, могут быть использованы сигналы кнопок, переключателей, конечных выключателей, датчиков различных параметров и т.п.
х1 – включение системы управления (подача напряжения на схему);
х2 –сигнал поступления плиты на транспортер;
х3 –плита находится в положении готовой к захвату;
х4 –каретка с присосами находится над плитой;
х5 - каретка с присосами находится над столом;
х6 –стол находится в верхнем положении;
х7 - стол находится в нижнем положении;
Выходные сигналы:
В качестве исполнительных элементов в автоматических системах используют гидро- и пневмоцилиндры, электрические двигатели, муфты и магниты, диафрагменные пневматические и гидравлические лопастные механизмы и т.д.
На уровне систем управления к исполнительным элементам можно отнести такие элементы, срабатывание которых вызывает включение перечисленных выше двигателей, цилиндров и т.п. Речь идет о магнитных пускателях, контакторах, электромагнитах, управляющих цилиндрах. К этой же категории можно отнести различного рода сигнальные лампы, вторичный приборы, сирены, звонки, и т.д.
у1 –включение транспортера;
у2 –подвод каретки с присосами к транспортеру;
у3 - подвод каретки с присосами к столу;
у4 –подъем стола;
у5 –опускание стола;
Составим логическое уравнение:
![]()
![]()
![]()
![]()
![]()
На основе логического уравнения составим контактную схему управления:
Выбор технических средств:
|
х1 |
ВК16-19Б22121-40Т3 |
Кнопка с механической фиксацией |
|
х2 |
ВК-211 |
Выключатель концевой (проходной) |
|
х3 |
ВК-441 |
Выключатель концевой (дожимной) |
|
х4 |
||
|
х5 |
||
|
х6 |
||
|
х7 |
||
|
у1 |
П-300 |
Электромагнит пускателя двигателя |
|
у2 |
||
|
у3 |
||
|
у4 |
||
|
у5 |
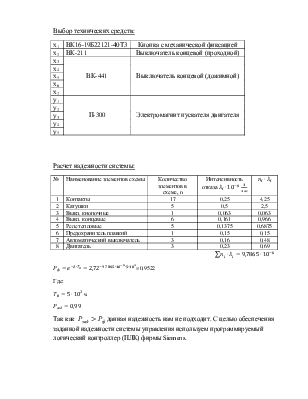
Расчет надежности системы:
|
№ |
Наименование элементов схемы |
Количество элементов в схеме, n |
Интенсивность отказа |
|
|
1 |
Контакты |
17 |
0,25 |
4,25 |
|
2 |
Катушки |
5 |
0,5 |
2,5 |
|
3 |
Выкл. кнопочные |
1 |
0,063 |
0,063 |
|
4 |
Выкл. концевые |
6 |
0,161 |
0,966 |
|
5 |
Реле тепловые |
5 |
0,1375 |
0,6875 |
|
6 |
Предохранитель плавкий |
1 |
0,15 |
0,15 |
|
7 |
Автоматический выключатель |
3 |
0,16 |
0,48 |
|
8 |
Двигатель |
3 |
0,23 |
0,69 |
![]()
![]() =0,9522
=0,9522
Где:
![]()
![]()
Так как ![]() данная
надежность нам не подходит. С целью обеспечения заданной надежности системы
управления используем программируемый логический контроллер (ПЛК) фирмы Siemens.
данная
надежность нам не подходит. С целью обеспечения заданной надежности системы
управления используем программируемый логический контроллер (ПЛК) фирмы Siemens.
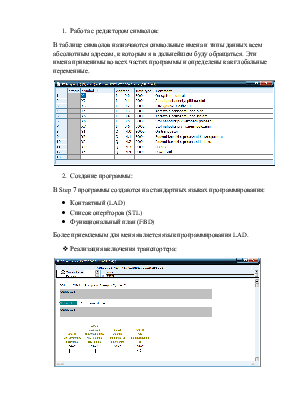
1. Работа с редактором символов:
В таблице символов назначаются символьные имена и типы данных всем абсолютным адресам, к которым я в дальнейшем буду обращаться. Эти имена применимы во всех частях программы и определены как глобальные переменные.
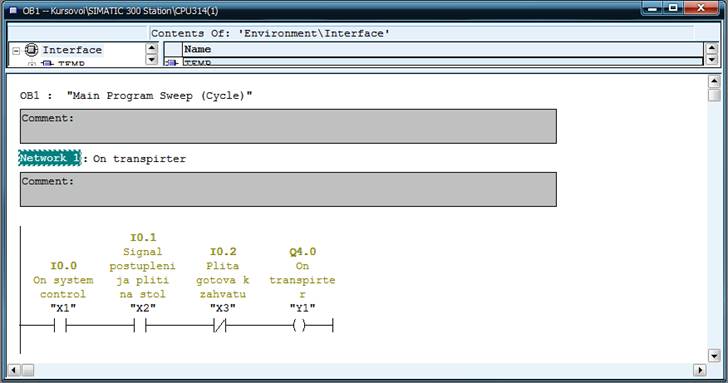
2. Создание программы:
В Step 7 программы создаются на стандартных языках программирования:
· Контактный (LAD)
· Список оперfторов (STL)
· Функциональный план (FBD)
Более приемлемым для меня является язык программирования LAD.
v Реализация включения транспортера:
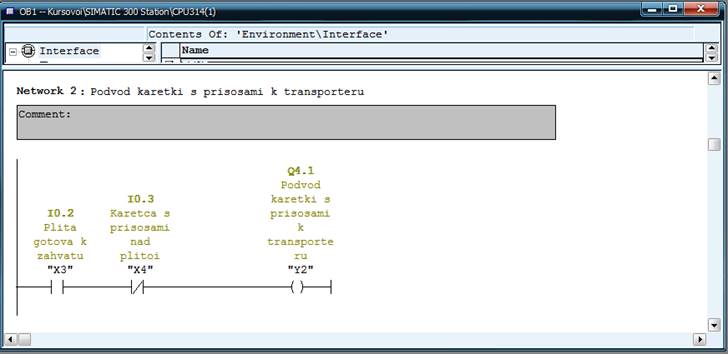
v Реализация поворота каретки с присосами к транспортеру:
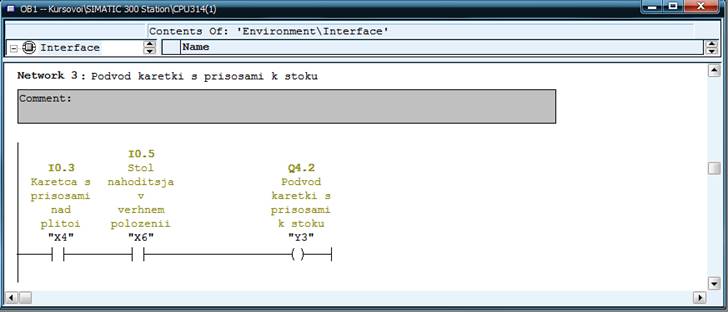
v Подвод каретки с присосами к столу:
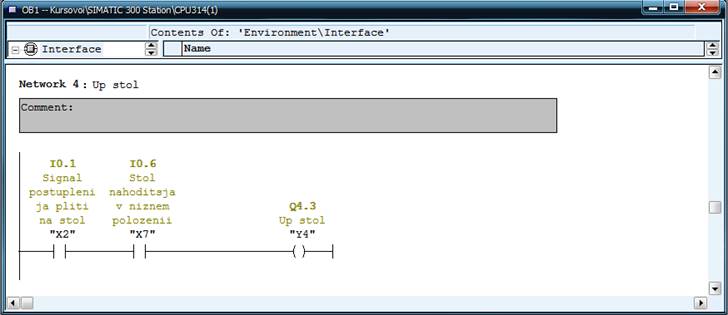
v Сигнал подъема стола:
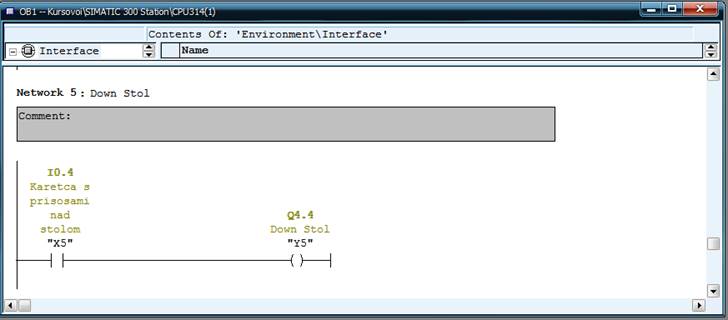
v Сигнал на опускание стола:
Литература:
1. – Технические средства автоматизации. МГУЛ.
2. Полищук А.Н. Леонов Л.В. – Системы управления химико-технологическими процессами производства древесных плит- Моск. Издат. МГУЛ ,412 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.