


















Министерство образования Российской Федерации
Государственное образовательное учреждение
высшего профессионального образования
«ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Институт - кибернетики
Направление – автоматизация Технологических процессов и производств
Кафедра – интегральных компьютерных систем управления
Проектирование систем управления двигателем постоянного тока
Курсовая работа по дисциплине
«АЭП НГО»
студентка гр. 8291 _____________
(подпись)
руководитель _____________
(подпись)
Томск 2012г.
Министерство образования Российской Федерации
Государственное образовательное учреждение высшего профессионального образования
«ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра_____________________
УТВЕРЖДАЮ:
Зав. кафедрой____________(И.О.Ф.)
(Подпись, дата)
ЗАДАНИЕ
на выполнение курсовой работы
Студентке гр. 8291
1Тема курсовой работы _______________________________________________________
(утверждена приказом ректора (распоряжением декана) от____№___
2 Срок сдачи студентом готовой работы_____________________
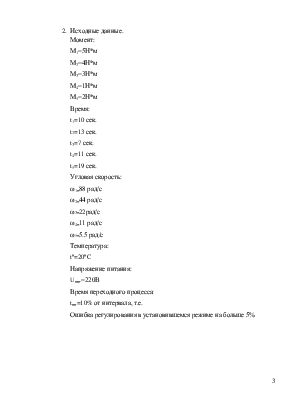
3 Исходные данные к работе
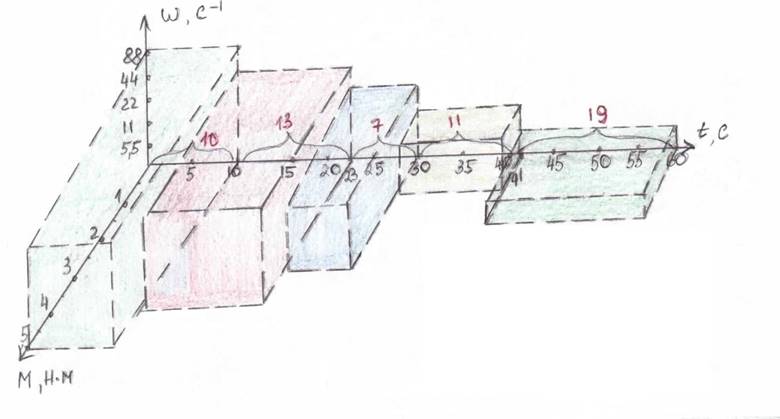
1. Нагрузочная диаграмма.
2. Исходные данные.
Момент:
М1=5Н*м
М2=4Н*м
М3=3Н*м
М4=1Н*м
М5=2Н*м
Время:
t1=10 сек.
t2=13 сек.
t3=7 сек.
t4=11 сек.
t5=19 сек.
Угловая скорость:
ω1=88 рад/с
ω2=44 рад/с
ω3=22рад/с
ω4=11 рад/с
ω5=5.5 рад/с
Температура:
tº=20ºC
Напряжение питания:
Uпит=220В
Время переходного процесса:
tпп=10% от интервала, т.е.
Ошибка регулирования в установившемся режиме на больше 5%
Руководитель________________ (И.О.Ф.)
(подпись, дата)
Задание принял к исполнению
____________________________ (И.О.Ф.)
(подпись, дата)
Содержание
Введение. 6
1.1 Двигатель постоянного тока. 7
1.2 Выбор элементов, расчет параметров силовой части………………………8
1.3 Подбор силового драйвера. 12
1.4 Выбор датчиков тока и скорости. 13
1.5 Выбор микроконтроллера. 15
2.1 Выбор функциональной схемы системы управления двигателем постоянного тока. 18
2.2 Синтез регуляторов методом модального оптимума. 19
2.3 Расчет контура тока. 20
2.4 Расчет контура скорости. 22
3.1 Моделирование процесса в пакете MatLab Simulink. 23
Заключение. 24
Список использованных источников. 25
В данном курсовом проекте осуществляется подбор двигателя постоянного тока по определенным параметрам, заданным в варианте задания. Рассматриваются вопросы подбора схемы питания и выбора ее частей из линейки элементов, выпускаемых промышленностью; проектируется схема управления, в том числе: осуществляется выбор подходящего силового драйвера, МК, датчиков тока и скорости. По окончании расчетов системы электропривода будет произведено моделирование системы в пакете MatLab Simulink.
1.1 Двигатель постоянного тока.
Двигатель постоянного тока — электромеханический преобразователь энергии электрической в механическую, работающий от сети постоянного тока и имеющий в составе щёточно-коллекторный узел.
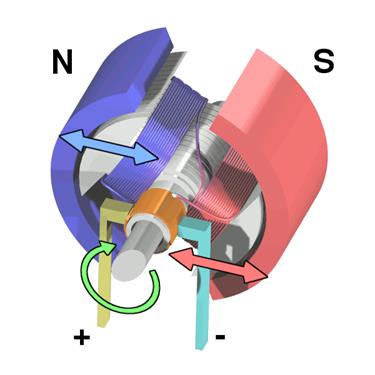
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором.
Принцип действия основан на взаимодействии основного магнитного поля главных полюсов, с магнитным полем якоря вращающегося внутри. Поле якоря образуется (рамки с током) протекающим по обмотке постоянным электрическим током, который в каждый момент в зависимости от положения якоря протекает по одной из фаз.
Щеточно-коллекторный узел выполняет роль электромеханического преобразователя рода тока постоянного в переменный и коммутатора, подключая в текущий момент времени ту фазу обмотки якоря (катушку), который формирует максимальный электрический момент.
1.2 Выбор элементов, расчет параметров силовой части.
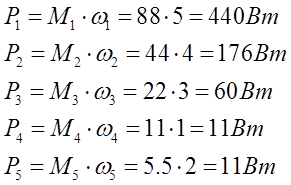
Исходя из заданных характеристик и диаграммы работы исполнительного механизма, на первом этапе необходимо определить продолжительность включенного состояния электропривода и среднюю мощность за цикл работы.
Первоначально рассчитаем среднеквадратичную мощность за цикл работы.
![]()
![]() Вт
Вт
Определим продолжительность включения: ПВ= 
Так как сумма ![]() и
и ![]() совпадает,
то ПВ=100%
совпадает,
то ПВ=100%
На основе определенных ![]() и
ПВ производим выбор двигателя, при этом мощность двигателя
и
ПВ производим выбор двигателя, при этом мощность двигателя ![]()
![]() - коэффициент запаса
- коэффициент запаса ![]()
Выберем ![]() =1,2,
тогда
=1,2,
тогда
![]()
Таким образом, двигатель следует выбирать исходя из
следующих параметров: ![]()
![]()
![]()
Проведем анализ нескольких двигателей, которые могли бы подойти.
 Наиболее подходящие по параметрам оказались
двигатели серии ДК1.
Наиболее подходящие по параметрам оказались
двигатели серии ДК1.
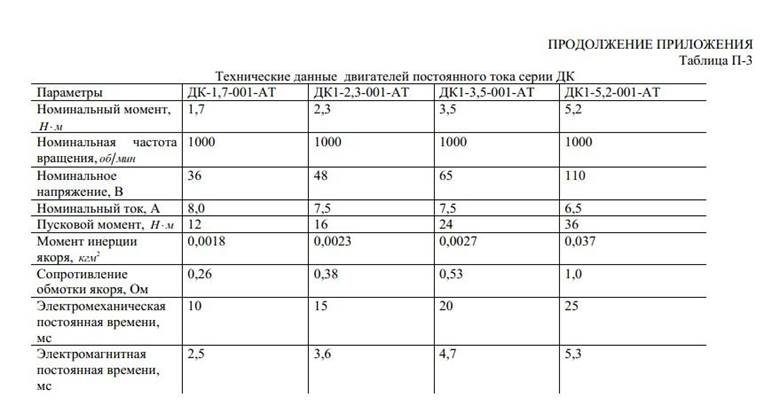
Рис 2. Технические данные двигателей постоянного тока серии ДК.
Рассмотрим двигатели серии ДК:
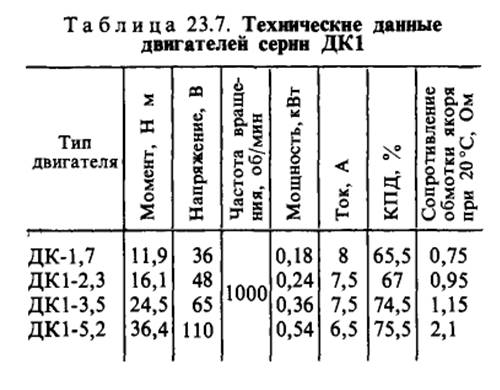
Рис 2.1 Технические данные двигателей постоянного тока серии ДК.
Проанализируем каждый двигатель.
Таблица 1.
|
Тип двигателя |
Номинальный момент, Н*м |
Мощность, Вт |
Частота вращения, об/мин |
|
ДК-1,7 |
1,7 |
180 |
1000 |
|
ДК1-2,3 |
2,3 |
240 |
1000 |
|
ДК1-3,5 |
3,5 |
360 |
1000 |
|
ДК1-5,2 |
5,2 |
540 |
1000 |
*-жирным шрифтом выделены параметры, подходящие по условию.
Таким образом, из таблицы 1 видно, что самый подходящий тип двигателя - ДК1-5,2.
Запишем его характеристики:
Таблица 2.
|
Тип двигателя |
Номи-нальный момент, Н*м |
Номин-альная скорость об/мин |
Номи-нальная мощность, Вт |
Номи-нальный ток, А |
Напря-жение,В |
КПД,% |
Момент Пусковой, Н*м |
Ток Пусковой, А |
Момент инерции якоря, кг*м2 |
Активное сопротив-ление якоря, Ом |
Индук-тивность обмотки, Гн |
Электромагнитная постоянная, мс |
|
ДК1-5,2-001-АТ |
5,2 |
1000 |
715 |
6,5 |
110 |
75,5 |
36 |
16.25 |
0,037 |
1 |
25 |
5,3 |
Обычно, пусковой ток принимают равным 2.5*ток номинальный , т.о.:
![]()
Данный результат записан в таблицу 2.
1.3 Подбор силового драйвера.
Необходимые условия для подбора силового драйвера:
Интеллектуальный силовой драйвер должен содержать встроенные элементы токовой, температурной защиты, защиты от перенапряжения, встроенные датчики тока и скорости. При этом:
· ток силового драйвера > 6.5 А,
· Пусковой ток < Предельного тока драйвера,
· Напряжение силового драйвера > 110В
Наиболее подходящий по параметрам силовой драйвер - IRAMX16UP60A.

Рис. 3 Силовой драйвер IRAMX16UP60A.
Характеристики драйвера
Таблица 3
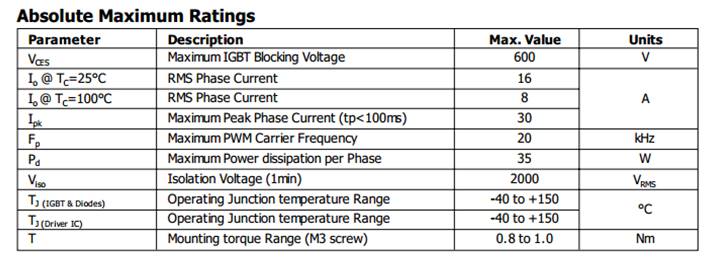
Из таблицы 3 видно, что данный драйвер полностью удовлетворяет заданным параметрам, а именно
Напряжение драйвера больше напряжения двигателя 600В>110В
Максимальный ток больше тока пускового 30A>16.25A
Ток силового драйвера > номинального тока двигателя 8A>6.5A
Функциональная схема силового драйвера:
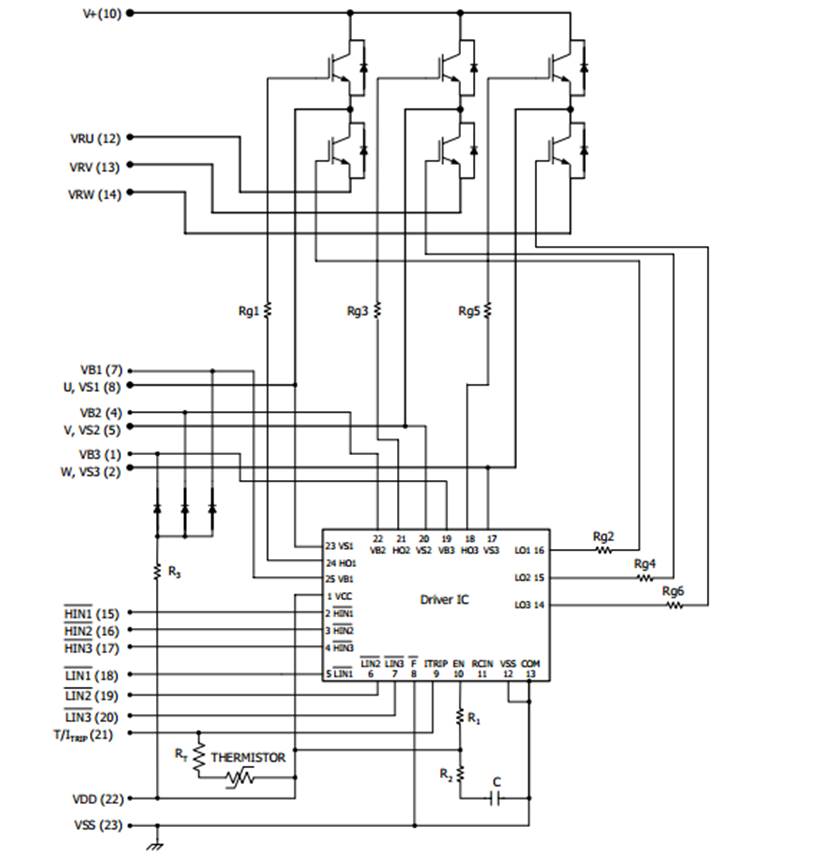
Рис. 4 Функциональная схема силового драйвера.
1.4 Выбор датчиков тока и скорости.
Датчик тока предназначен для
измерения тока якоря двигателя и преобразования его в соответствующее
стандартное напряжение системы управления ![]() .
В качестве датчика тока применяется измеритель напряжения шунта с
.
В качестве датчика тока применяется измеритель напряжения шунта с ![]() или
150 мВ и номинальным диапазоном токов 50, 75, 100,150, 200, 300, 400,
500 А. Шунт подбирается таким образом, чтобы его номинальный ток был близок к
пусковому току двигателя. Таким образом, коэффициент передачи датчика равен:
или
150 мВ и номинальным диапазоном токов 50, 75, 100,150, 200, 300, 400,
500 А. Шунт подбирается таким образом, чтобы его номинальный ток был близок к
пусковому току двигателя. Таким образом, коэффициент передачи датчика равен:
![]()
где ![]() -
номинальный ток шунта, выбранный из стандартного диапазона токов и неравенства:
-
номинальный ток шунта, выбранный из стандартного диапазона токов и неравенства:
![]() .
Сопротивление выбранного шунта равно:
.
Сопротивление выбранного шунта равно:![]() .
.
В качестве датчиков скорости могут использоваться датчики
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.