





















МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
«Оренбургский государственный университет»
Кафедра деталей машин и прикладной механики
, ,
КИНЕМАТИЧЕСКИЙ РАСЧЕТ
СИЛОВОГО ПРИВОДА
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО КУРСОВОМУ ПРОЕКТИРОВАНИЮ
ДЛЯ СТУДЕНТОВ ИНЖЕНЕРНО-ТЕХНИЧЕСКИХ СПЕЦИАЛЬНОСТЕЙ
Рекомендовано к изданию редакционно-издательским советом
государственного образовательного учреждения
высшего профессионального образования
«Оренбургский государственный университет»
|
ББК 34.447я7
Р47
УДК 621.81(07)
Рецензент
кандидат технических наук, доцент
, ,
Р47 Кинематический расчет силового привода: Методические указания по курсовому проектированию для студентов инженерно-технических специальностей. – Оренбург: ГОУ ОГУ, 2005. – 29 с.
Методические указания предназначены студентам инженерно-технических специальностей ГОУ ОГУ для выполнения кинематического и энергетического расчетов силового привода в курсовых проектах, курсовых и расчетно-графических работах.
ББК 34.445 я73
Ó , 2005
|
Ó , 2005
|
![]() Содержание
Содержание
с.
Введение............................................................................................................ 4
1 Исходные данные для расчета............................................................................................................ 4
2 Описание структурных схем приводов............................................................................................................ 4
3 Задачи кинематического расчета............................................................................................................ 8
4 Последовательность выполнения кинематического расчета............................................................................................................ 8
4.1 Выбор и проверка электродвигателя......................................................................................................... 8
4.2 Определение общего передаточного числа привода и разбивка его между отдельными ступенями....................................................................................................... 15
4.3 Определение частот вращения и угловых скоростей валов....................................................................................................... 19
4.4 Определение мощностей и вращающих моментов на валах привода....................................................................................................... 19
5 Пример кинематического расчета привода общего назначения.......................................................................................................... 21
5.1 Выбор и проверка электродвигателя....................................................................................................... 22
5.2 Определение общего передаточного числа и разбивка его между ступенями....................................................................................................... 23
5.3 Определяем частоты вращения валов привода....................................................................................................... 23
5.4 Определяем угловые скорости валов привода....................................................................................................... 23
5.5 Определяем мощности на валах привода....................................................................................................... 24
5.6 Определяем вращающие моменты на валах привода....................................................................................................... 24
6 Пример кинематического расчета привода цепного транспортера.......................................................................................................... 25
6.1 Выбор и проверка электродвигателя....................................................................................................... 26
6.2 Определение общего передаточного числа и разбивка его между ступенями....................................................................................................... 27
6.3 Определение частот вращения валов привода....................................................................................................... 28
6.4 Определение угловых скоростей валов привода....................................................................................................... 28
6.5 Определение мощностей на валах привода....................................................................................................... 28
6.6 Определение вращающих моментов на валах привода....................................................................................................... 28
Список использованных источников.......................................................................................................... 29
Кинематический расчет силового привода выполняется студентами в процессе изучения таких дисциплин, как «Прикладная механика», «Детали машин», «Детали машин и основы конструирования», «Основы конструирования машин», а также других родственных дисциплин при выполнении расчетно-графических работ и курсовых проектов.
В настоящих методических указаниях даны рекомендации, справочный материал и примеры кинематического расчета типовых приводов.
Условные обозначения величин приняты в соответствии с рекомендациями ISO R31 и государственных стандартов. При этом использована международная система (SI) единиц величин, а внесистемная единица частоты вращения (мин-1) применяется лишь дополнительно к единице угловой скорости (рад/с).
Данные указания должны способствовать ускорению разработки и оформления кинематических расчетов, а также их унификации.
Исходными данными для выполнения кинематического расчета и курсового проекта (курсовой работы) в целом могут служить:
- структурная схема привода;
- окружная (тяговая) сила Fто, Н и скорость движения Vто, м/с тягового органа или вращающий момент Трв, Н∙м на приводном валу рабочего органа (вала) машинного агрегата и угловая скорость ωрв, рад/с этого вала;
- диаметр барабана или звездочки D, м;
- график или режим нагрузки;
- вид движения передач (реверсивное или нереверсивное);
- срок службы привода Lh, час;
- серийность выпуска приводов.
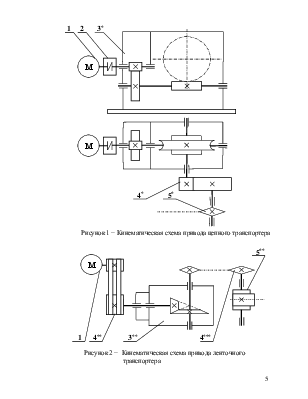
Каждый структурный элемент привода на кинематической схеме имеет свое индивидуальное обозначение.
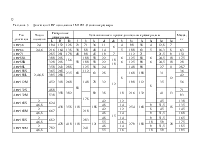
Для примера на рисунках 1 и 2 приведены кинематические схемы типовых приводов, которые в своей структуре имеют: электродвигатель 1; муфту (упругую компенсирующую) 2; редукторы 3: двухступенчатый цилиндро-червячный 3* и одноступенчатый конический 3**; внешние передачи 4: зубчатую 4*, клиноременную 4**, цепную 4***; приводной вал рабочего органа 5 машинного агрегата: приводную звездочку 5* цепного конвейера и приводной барабан 5** ленточного транспортера.
Для рассматриваемых приводов рекомендуется выбирать трехфазные асинхронные двигатели с короткозамкнутым ротором серии АИР выполненные по ТУ 16−525.564−84, имеющие простую конструкцию, небольшую стоимость и достаточно высокую надежность. Эти двигатели характеризуются номинальной мощностью Рэд, кВт, синхронной и асинхронной частотами вращения ротора nс, мин-1 и nэд, мин-1, кратностью максимального и номинального вращающих моментов Тmax/Тном.
Синхронная частота вращения ротора (вала) электродвигателя:
 , где
, где ![]() – промышленная
частота тока, Гц;
– промышленная
частота тока, Гц;
![]() – число пар
полюсов электродвигателя.
– число пар
полюсов электродвигателя.
Значения nc в зависимости от p при f =50 Гц приведены в таблице 1.
Таблица 1 − Синхронная частота вращения вала электродвигателя nc
|
р |
1 |
2 |
3 |
4 |
5 |
6 |
|
nс, мин-1 |
3000 |
1500 |
1000 |
750 |
600 |
500 500 50 |
Как
видно из вышеприведенной таблицы, с увеличением ![]() уменьшается
частота вращения электродвигателя.
уменьшается
частота вращения электродвигателя.
Поскольку двигатели с большим числом пар полюсов имеют большие габариты, то тихоходные электродвигатели (nс=750 мин-1 и менее) в рассчитываемых приводах рекомендуется применять ограниченно.
В расчетах следует использовать асинхронную (фактическую) частоту вращения вала электродвигателя:
nэд = nс·(1−s), где s = (2÷10) % − электромагнитное скольжение электродвигателя.
Тогда nэд = (0,90...0,98)· nс .
Эта величина обычно и указывается в справочных таблицах.
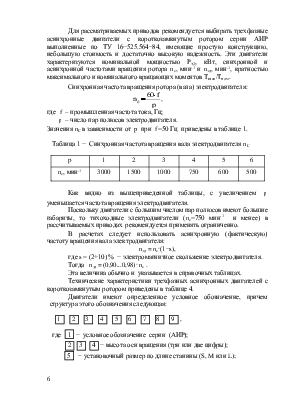
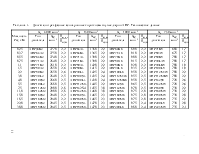
Технические характеристики трехфазных асинхронных двигателей с короткозамкнутым ротором приведены в таблице 4.
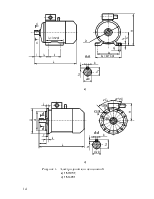
Двигатели имеют определенное условное обозначение, причем структура
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.