МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФГБОУ ВПО
«ТУЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
Кафедра робототехники
Контрольно-курсовая работа по дисциплине:
«Теория автоматического управления»
Вариант 314-5
Выполнил: ст гр.220321
Проверила: доцент к.т.н.
Тула 2014
Оглавление
Содержание. 2
Вариант задания. 3
Решение. 3
Структурная схема. 3
Дифференциальная схема. 3
Уравнение, описывающие процессы в объекте управления в векторно-матричной форме: 4
Функциональная схема системы с пропорциональным регулятором и заданным объектом управления, охваченного единичной обратной связью: 5
Определим передаточные функции
разомкнутой системы ![]() ,
, ![]() и замкнутой системы
и замкнутой системы ![]() по входному воздействию,
по входному воздействию, ![]() возмущению и
возмущению и ![]() ошибке: 6
ошибке: 6
Построение ЛАФЧХ разомкнутой системы.. 7
Определение частоты среза и критической частоты разомкнутой системы, полосы пропускания системы, запаса устойчивости по фазе или амплитуде: 8
Определение низкочастотной, среднечастотной и высокочастотной областей: 8
Рассчёт по косвенным оценкам качества предполагаемые значения времени регулирования, перерегулирования и статической ошибки в исследуемой замкнутой системе: 9
Оценка статическую точность замкнутой системы при отсутствии и действии возмущения: 10
Методом моделирования построение переходного процесса в замкнутой системе: 10
Заключение. 11
Список литературы.. 12
Задание является индивидуальным, каждый студент получает свой вариант задания. В данном случае вариант представляет собой четырёхзначный номер: 314-5.
Для данного варианта задания таблица значений имеет вид:
|
Вариант |
K1 |
K2 |
K3 |
Ta |
β |
|
5 |
2 |
4 |
2 |
0,2 |
0,4 |
![]()
![]()
![]()
![]()
![]()
![]()
![]()
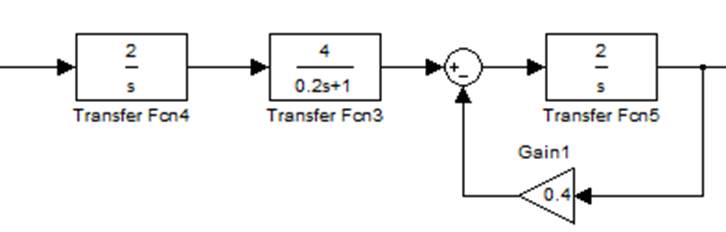
Она включает в себя 3 звена:
· Интегрирующее звено: ![]()
· Апериодическое звено: ![]()
· Интегрирующее звено, охваченное
отрицательной обратной связью с коэффициентом β: ![]()
Найдём
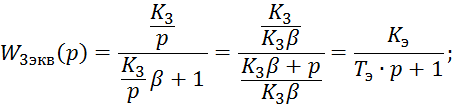
Где ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
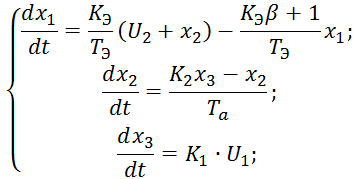
Составим систему дифференциальных уравнений:
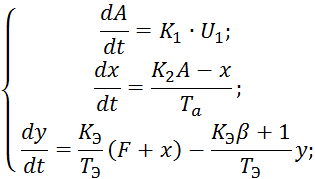
![]()
![]()
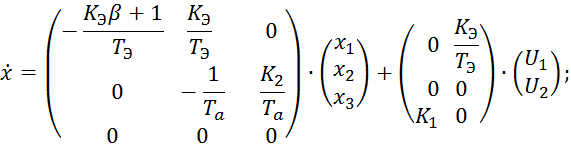
Заменим A, x, y, U1, F:
![]()
![]()
![]()
![]()
![]()
Получим следующую систему:
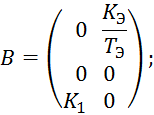
Далее определим матрицы A, B и C:
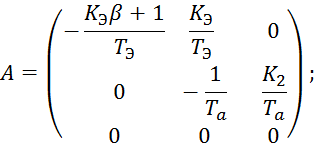
![]()
![]()
![]()
![]()
![]()
![]()
![]()

1. Анализируя полученную схему можно сделать вывод, что в данной системе используется принцип управления по отклонению.
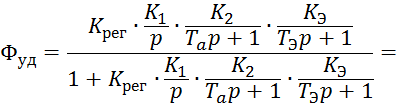
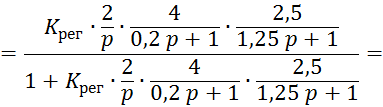
2. Рассчитаем коэффициент усиления пропорционального регулятора:
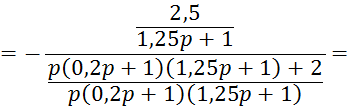
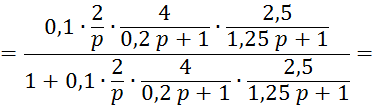
Для начала запишем передаточную функцию системы:

![]()
![]()
![]()
![]()
![]()
Cоставим определитель Гурвица:
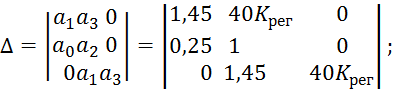
Согласно
частотному случаю критерия Гурвица – критерию Вышнеградского — для устойчивости
системы третьего порядка необходимо и достаточно выполнения условия: ![]() Отсюда следует:
Отсюда следует:
![]()
![]()
![]()
![]()
Для
устойчивости системы выберем ![]() .
.
![]()
![]()
![]()
![]()

![]()


![]()

![]() ;
;

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Полоса пропускания определяется по
уровню -3дб. Тогда ![]()
![]() 9,25 дб;
9,25 дб; ![]()
Так как разница мала, мы можем взять реальную ЛАФЧХ, построенную в MatLab для расчётов:
![]()
![]()
![]()
![]()
Оценим воспроизведение системы входного гармонического сигнала для выбранных значений низкой, средней и высокой частоты:
Для Низкочастотной области:
![]()
![]() ;
;
![]()
![]()
![]()
Для Среднечастотной области:
![]()
![]()
![]()
![]()
![]()
Для Высокочастотной области:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() => Система устойчива.
=> Система устойчива.
Так как к 0 ближе располагается комплексно-сопряжённые корни в системе будет наблюдаться колебательный процесс.
Статическая ошибка:
![]()
![]()
![]() ;
;

![]() ;
;
Система обладает астатизмом. Следовательно, статическая ошибка равна 0.
Время регулирования:

Перерегулирование:
![]()
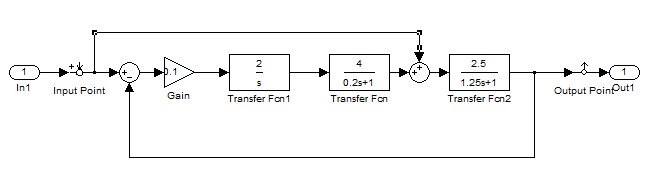
Структурная схема с учётом действия внешнего возмущения
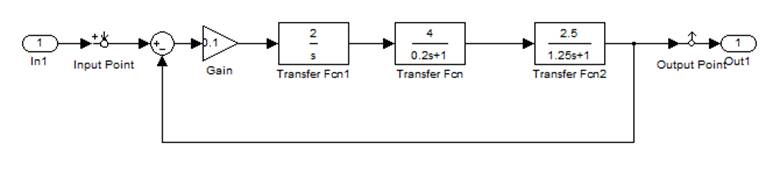
Структурная схема без действия внешнего возмущения
 Время регулирования по переходному
процессу из MatLab:
Время регулирования по переходному
процессу из MatLab:
При отсутствии возмущения:
![]()
При действии возмущения:
![]()
Так как полученные данные сходятся с данными ЛАФЧХ построенной в MatLab. Следовательно, расчёты произведены верно.
При выполнении данной курсовой работы закрепляются на практике теоретические знания методов и принципов анализа, проектирования линейных систем автоматического управления, а также методик исследования и проектирования систем регулирования и автоматики.
1. Теория систем автоматического управления / В.А. Бесекерский, Е. П. Попов. – [Издание 4-е, переработанное и дополненное]. – СПб.:Профессия, 2004. – 752 с.
2. Теория автоматического управления: Учебник для студентов вузов, обучающихся по направлениям «Автоматизация и управление», Системный анализ и управление» / А.А. Ерофеев. – 2-е издание, дополненное и переработанное – СПб.: Политехника, 2003 – 302 с.
3. Теория автоматического регулирования: Учебное пособие для студентов вузов, обучающихся по направлению «Автоматизация и управление» / А.С. Востриков, Г.А. Французова. – М.: Высшая школа, 2004. – 365 с.
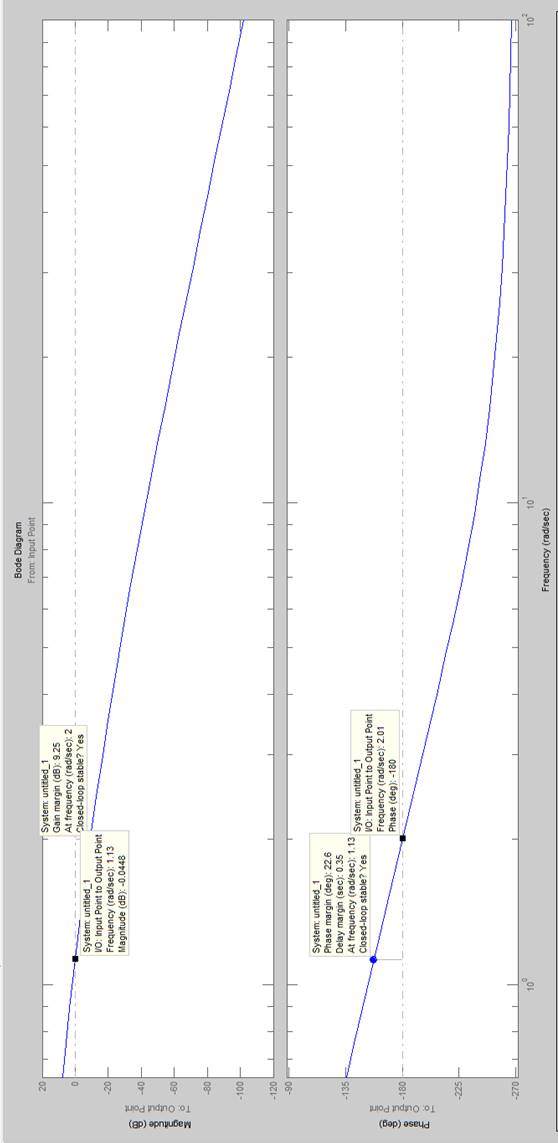
ЛАФЧХ
разомкнутой системы
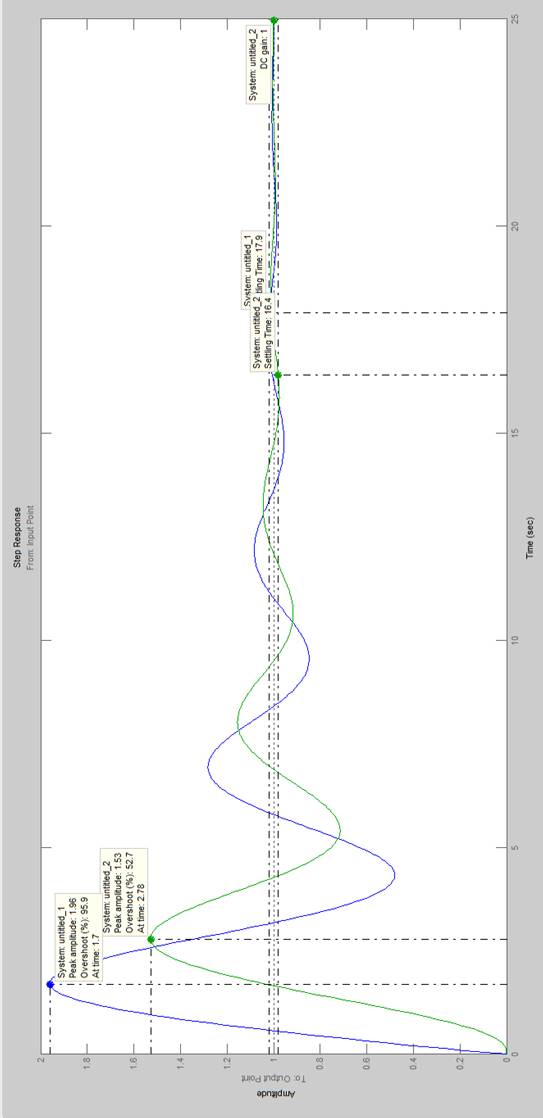
График переходного процесса для систем с учётом и не учётом действия внешнего возмущения
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.