Измеряемая сила должна прикладываться к датчику комплекта для контроля перегрузки лифта на центральную цилиндрическую часть.
Место прикладывания силы указано на рисунке, представленном ниже.
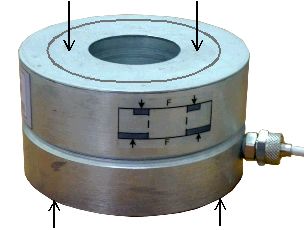
Рисунок 3.3 – Действие силы
Комплект для контроля перегрузки лифта обеспечивает выдачу релейных сигналов о весе груза, находящегося в кабине лифта.
Комплект для контроля перегрузки лифта состоит из одного или двух (в зависимости от способа и места установки) датчиков силы и модуля КПЛ 1.1. В случае использования одного датчика силы, он подключается к каналу 1.
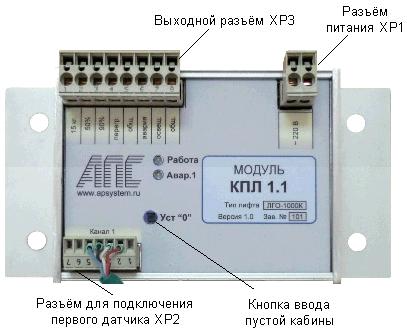
Рисунок 3.4 - Общий вид модуля КПЛ 1.1
Вес кабины лифта с пассажирами воспринимается датчиком (датчиками) силы, преобразуется в электрический сигнал и передаётся в модуль КПЛ 1.1. Модуль КПЛ 1.1 измеряет входные сигналы и рассчитывает вес в килограммах. Если датчиков силы несколько, их показания (переведённые в килограммы) суммируются. Далее из измеренного веса кабины с грузом вычитается вес пустой кабины, и результат сравнивается с четырьмя порогами.
первый порог — 20 кг;
второй порог — 50 % от номинальной грузоподъёмности лифта;
третий порог — 90 % от номинальной грузоподъёмности лифта;
четвёртый порог — 110 % от номинальной грузоподъёмности лифта или превышение номинальной грузоподъёмности лифта на 75 кг — в зависимости от того, какое значение окажется больше. То есть для лифта номинальной грузоподъёмностью 400 кг четвёртый порог будет равен 475 кг (400+75), а для лифта грузоподъёмностью 1000 кг — 1100 кг (1000 * 110%).
При достижении какого-либо порога соответствующее ему реле замыкается, так что пустой кабине соответствуют все четыре замкнутых контакта реле, а перегруженной кабине — четыре разомкнутых.
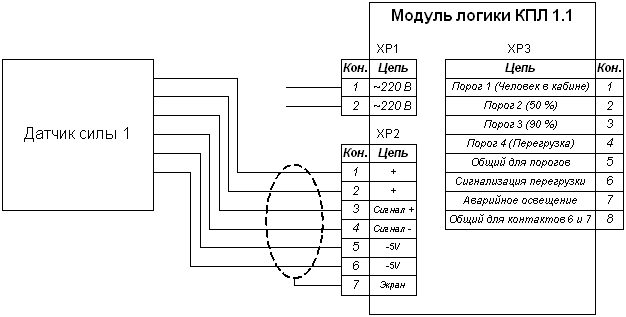
Рисунок 3.5 - Схема электрических соединений
3.2.2 Датчик этажа
ДГНО-3 - датчик герконовый, нормально-открытый.
Датчики данного типа будем использовать для определения текущего положения лифта (номера этажа)
Краткое техническое описание:
Датчики герконовые работают от магнитного поля постоянного магнита. При попадание датчиков в магнитное поле с напряженностью превышающей МДС срабатывания, его контакты замыкаются. Таким образом, при прохождение мимо постоянного магнита контакты датчика замыкаются.
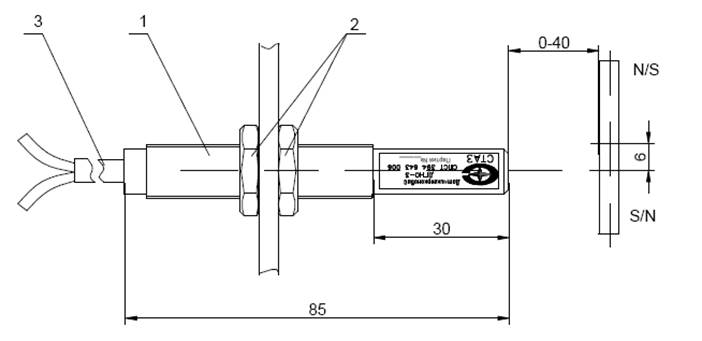
Рисунок 3.6 – Датчик герконовый нормально-открытый
3.2.3 Датчик препятствия
Устройство контроля проема дверей кабины ("Барьер-1М").
Данный датчик будет использоваться для определения препятствия между дверями.
Основные технические характеристики:
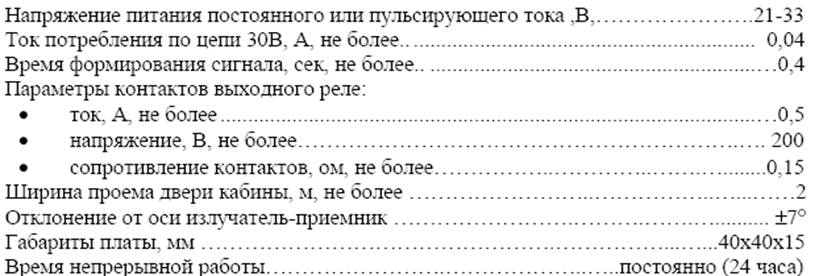
Краткое техническое описание:
Устройство «БАРЬЕР-1» представляет собой микропроцессорное устройство, обеспечивающее контроль проема дверей кабины лифта с помощью одного луча модулированного инфракрасного излучения малой мощности. При пересечении луча оптически непрозрачным объектом включается выходное реле и индикационный светодиод.
Изделие «БАРЬЕР-1» состоит из:
- микропроцессорной платы управления с разъемами;
- излучателя;
- приемника;
Для соединения с цепями лифта применен 4-х штырьковый разъем AMP-Х1.Назначение контактов разъема Х1:
1– общий;
2– контакт 1 выходного реле;
3– напряжение питания +30В;
4– контакт 2 выходного реле.
Подключение приемника и излучателя осуществляется с помощью 3-х и 2-х штырьковых разъемов соответственно. Выходной сигнал изделия «БАРЬЕР-1» формируется с помощью реле с перекидными контактами. Вид выходного сигнала (нормально открытый или нормально закрытый контакт) регулируется джампером J1. Назначение контактов джампера J1:
1-2-используется нормально замкнутый контакт выходного реле
2-3-используется нормально разомкнутый контакт выходного реле.
Внешний вид и габаритно-присоединительные размеры платы управления приведены на рис.1. Габаритные размеры приемника и излучателя приведены на рисунках 3.7 и 3.8. Схема подключения внешних и внутренних цепей приведены на рисунке 3.9.
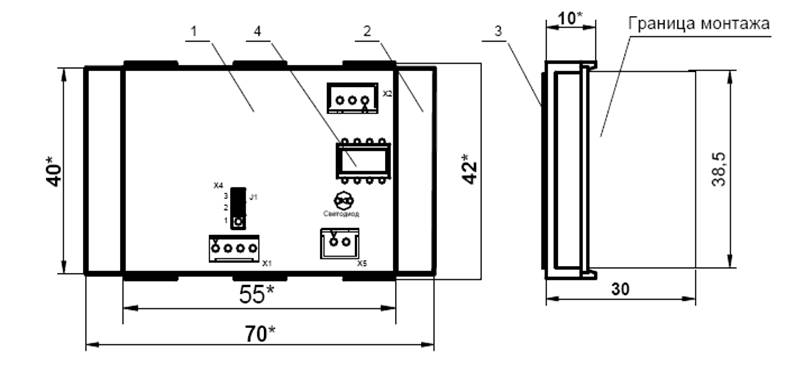
Рисунок 3.7 – Габаритно – присоединительные размеры платы управления
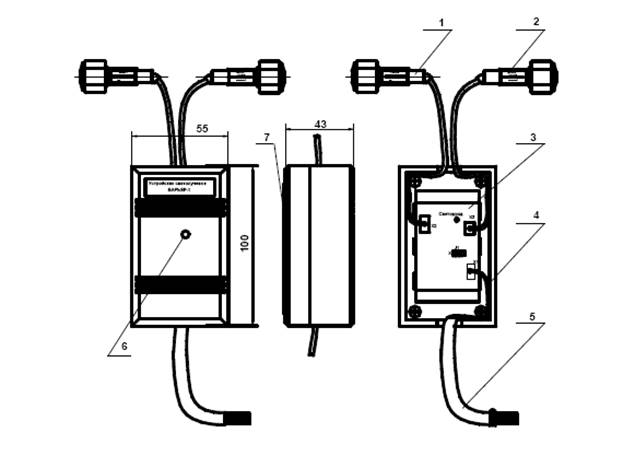
Рисунок 3.8 – Плата управления в корпусе
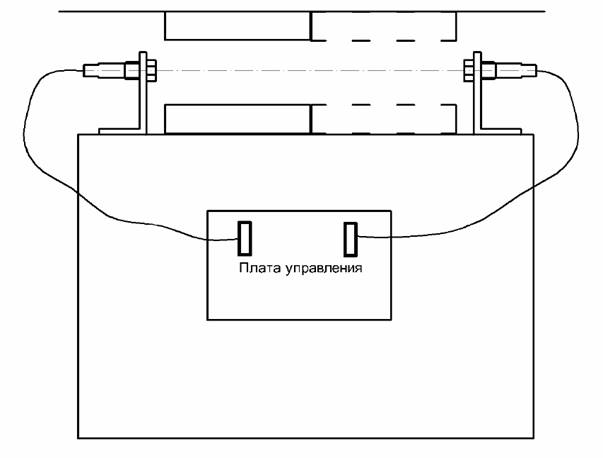
Рисунок 3.9 – Установка излучателя и приемника на кабине (вид сверху)
3.2.4 Датчик положения

Рисунок 3.4 – Классификация датчиков положения
Датчики положения предназначены для бесконтактного или контактного определения положения объекта, индикации его попадания в зону срабатывания и выдачи релейного или аналогового сигнала, пропорционального расстоянию до объекта.
Индуктивные датчики положения реагируют на металлические объекты ( например, положение штока клапана или зуб шестерни).
Фотоэлектрические датчики положения подразделяются на диффузионные, с отражением от катафота, оппозитные, лазерные. Основные критерии выбора состоят в чистоте воздушной среды, расстоянии, качестве поверхности, наличии источников света.
Магнитные тахометрические ("magnetic pickup") датчики положения предназначены для точного определения частоты вращения вала по меткам (зубьям) на шестерне.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.