
















Министерство высшего и профессионального образования
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Самарский государственный технический университет»
Факультет автоматики информационных технологий
Кафедра «Автоматика и управление в технических системах»
Курсовая работа по предмету
«Элементы и устройства систем управления »
Система автоматического слежения за углом поворота сельсина-датчика.
Вариант 1.6
Выполнил студент:
3-АИТ-
Проверил:
Самара 2011
Оглавление
1. Исходные данные. 3
2. Вопросы в курсовой работе: 4
3. Введение. 5
4. Описание назначение и принцип работы системы. 6
5. Выбор составных элементов схемы.. 7
5.1 Двигатель. 7
5.2 Электромашинный усилитель. 9
6. Математическое описание звеньев САУ и вывод их передаточных функций. 10
6.1 ДПТ. 10
6.2 ЭМУ.. 12
7. Нахождение параметров передаточных функций. 14
7.1 ДПТ. 14
7.2 ЭМУ.. 15
7.3 Фазовый детектор. 15
7.4 Редуктор. 16
7.5 Сельсинова пара. 16
7.6 Нахождение коэффициента передачи предварительного усилителя. 16
8. Структурная схема САУ.. 18
9. Исследование системы. Определение запаса устойчивости во фазе и амплитуде. 19
10. Рекомендации по улучшению качества работы системы. 21
11. Список литературы.. 22
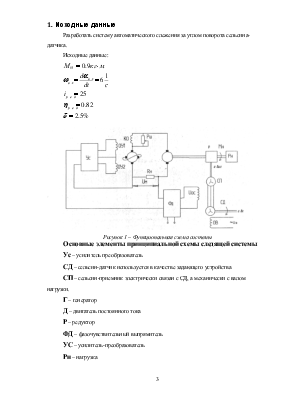
Разработать систему автоматического слежения за углом поворота сельсина-датчика.
Исходные данные:
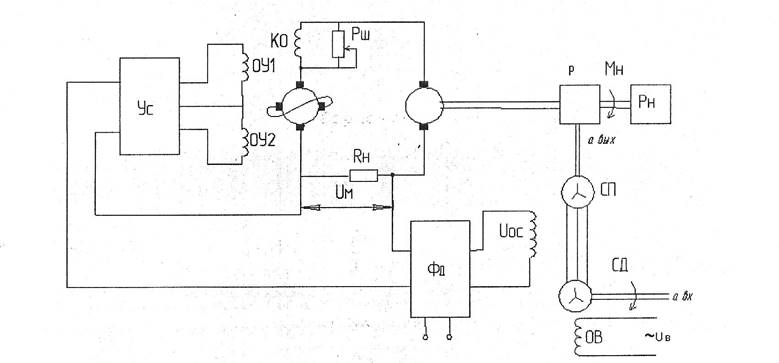
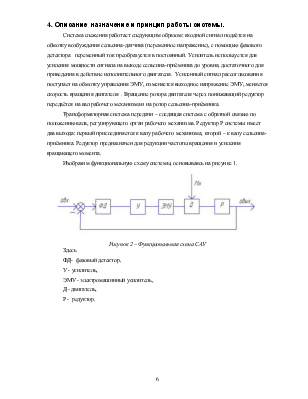
Рисунок 1 – Функциональная схема системы
Основные элементы принципиальной схемы следящей системы
Ус – усилитель преобразователь
СД – сельсин-датчик используется в качестве задающего устройства
СП – сельсин-приемник электрически связан с СД, а механически с валом нагрузки.
Г – генератор
Д – двигатель постоянного тока
Р – редуктор
ФД – фазочувствительный выпрямитель
УС – усилитель-преобразователь
Рн – нагрузка
1. Дать краткую характеристику назначения системы и описать ее работу.
2. Разбить систему на типовые звенья и вспомогательные устройства.
3. Разработать функциональную схему системы и обосновать выбор типовых элементов.
4. Для звеньев основного контура выполнить математическое описание и определить их передаточные функции.
5. Определить числовые значения параметров передаточных функций.
6. Привести результаты разработки структурной схемы системы и дать оценку ее статических свойств.
7. Произвести упрощенный статический расчет системы и определить требования к ее предварительному усилителю.
8. Произвести анализ полученных результатов выполнения курсовой работы и дать рекомендации по улучшению качества работы системы как в статическом, так и динамическом режимах ее работы.
9. Привести перечень литературных источников и учебных пособий, которые были использованы при выполнении курсовой работы.
Цель курсового проектирования – получение навыков расчета линейных, нелинейных и импульсных систем автоматического управления (САУ), предназначенных для автоматизации производственных процессов, а также для управления механизмами общепроизводственного назначения, проектирования систем слежения для автоматического регулирования; научиться синтезировать промышленные регуляторы, моделировать переходные процессы в САУ. Задачи курсового проекта – синтезирование, моделирование переходных процессов в САУ.
Проектирование следящей системы охватывает широкий круг вопросов - от математической постановки задачи до рабочих чертежей и их окончательной отработки по результатам испытаний опытных образцов. Поэтому, естественно, в многочисленных исследованиях, связанных с проектированием систем различного назначения, рассматриваются лишь отдельные аспекты этой большой проблемы.
Система слежения такого типа широко используется для дистанционного регулирования разными механизмами, а также при построении автоматических систем регулирования в разных отраслях промышленности. Использование систем слежения для автоматического регулирования, для решения задач автоматизации производственных процессов содействует появлению технико-экономического эффекта, значение которого определяется особенностями самих объектов регулирования, которые используются при производстве электронных средств.
Система слежения работает следующим образом: входной сигнал подаётся на обмотку возбуждения сельсина-датчика (переменное напряжение), с помощью фазового детектора переменный ток преобразуется в постоянный. Усилитель используется для усиления мощности сигнала на выходе сельсина-приёмника до уровня, достаточного для приведения в действие исполнительного двигателя. Усиленный сигнал рассогласования поступает на обмотку управления ЭМУ, изменяется выходное напряжение ЭМУ, меняется скорость вращения двигателя . Вращение ротора двигателя через понижающий редуктор передаётся на вал рабочего механизма и на ротор сельсина-приёмника.
Трансформаторная система передачи – следящая система с обратной связью по положению вала, регулирующего орган рабочего механизма. Редуктор Р системы имеет два выхода: первый присоединяется к валу рабочего механизма, второй – к валу сельсина-приёмника. Редуктор предназначен для редукции частоты вращения и усиления
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.