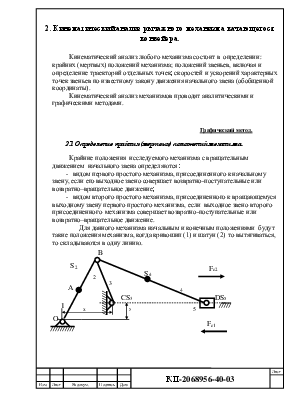
рисуем окружность радиусом ОА – траекторию движения кривошипа 1;
- радиусом CВ рисуем дугу – траекторию движения коромысла 3;
- точки деления обозначаем А2, А3, А4, и т. д. в направлении вращения кривошипа 1;
- строим положения кривошипа 1, соединяя точу О с точкой А3, и т. д.;
- из точек Аi радиусом АВ делаем засечки на траектории движения точки В;
- обозначаем полученные точки В1, В2, В3 и т. д.;
- соединяем точки Аi с точками Вi, получим положения шатуна 2;
- соединяем C с Вi , получим положения коромысла 3;
- из точек Вi радиусом CD делаем засечки на траектории движения ползуна 5;
- обозначаем полученные точки D1,D2,D3 и т. д.
- соединяем точки Вi с точками Di, получим положения шатуна 4;
- при построении планов механизма отмечаем (с учетом геометрических соотношений) положения центров масс звеньев 2 и 4 и строим их траектории;
- проверяем с помощью линейки и транспортира углы наклона и длины звеньев, результаты измерений заносим в таблицу 4;
- определяем начальное Dн и конечное Dк положение точки D;
- одно из положений рабочего положения (в данном случае положение 3) рисуем основными линиями.
2.3 Кинематическое исследование механизма аналитическим методом.
Сущность всех аналитических методов заключается в том, что линейные и угловые координаты, скорости и ускорения точек звеньев механизма определяются в виде аналитических выражений. Исходными данными для вывода выражений является: структурная схема механизма, изображающая механизм в любом (расчетном) положении, исключая крайние; размеры звеньев; заданные положения обобщенных координат механизма; законы движения обобщенных координат механизма во времени. Если последнее не задано, то уравнения записываются в функции обобщенных координат, т.е. определяют не сами искомые функции, а их аналоги.
В данном курсовом проекте применим метод замкнутых векторных контуров для исследуемого механизма (рис.1).
В соответствие с предложенным методом поступаем следующим образом:
1. Рисуем в расчетном (первом) положении структурную схему исследуемого механизма.
2. Структурную схему механизма располагаем в прямоугольной системе, начало которой помещаем в точку О.
3. Со звеньями механизма, включая и стойку, связываем векторы произвольного направления так, чтобы их последовательность образовывала замкнутые контуры.
4. Углы, определяющие положения векторов, отсчитываем от положительного направления оси ОХ против хода часовой стрелки.
![]()
![]() В
В
5. Записываем уравнение замкнутости первого контура в векторной форме. Для этого обходим его периметр, например, в направлении вектора L1, причем все векторы, совпадающие с направлением обхода, ставятся со знаком «+» и не совпадающие – со знаком «-». Так как мы ведем расчет для первого положения механизма, то все линейные и угловые характеристики должны быть снабжены индексом «1». Но ввиду неудобства оформления здесь и далее этот индекс будем опускать, но подразумевать его.
6. Рассмотрим контур OABCO:
L1+L2-L3-L6=0 (3.1)
Уравнению (3.1) соответствуют два уравнения проекций на оси координат:
![]() L1·cosj1+L2·cosj2-L3·cosj3-L6·cosj6=0
L1·cosj1+L2·cosj2-L3·cosj3-L6·cosj6=0
(3.2)
L1·sinj1+L2·sinj2-L3·sinj3-L6·sinj6=0
Среди величин, входящих в уравнение (3.2), переменными являются угол j1,j2,j3. Угол j1 является обобщенной координатой механизма, поэтому он должен быть задан. Из уравнений (3.2) подлежат определению углы j2,j3.
Анализ (3.2) показывает, что это уравнение сложно для решения. Для упрощения нахождения рассмотрим вместо контура OABCO контуры OACO и
ABCA. Для этого введем вектор L7, соединяющий точки А и С. Получим:
L1-L6+L7=0 (3.3)
L2-L3-L7=0 (3.4)
Cпроецируем (3.3) на оси координат:
![]() L1·cosj1+L6·cosj6-L7·cosj7=0
L1·cosj1+L6·cosj6-L7·cosj7=0
(3.5)
L1·sinj1+L6·sinj6-L7·sinj7=0
Из уравнения (3.5) находим угол наклона вектора L7:
j7=![]()
где: L6соsφ6=X; L6sinφ6=Y;
и его модуль:
L7=![]() (3.7)
(3.7)
Запишем уравнение (3.4) в развернутом виде и найдем углы j2 и j3:
![]() L2·cosj2+L3·cosj3-L7·cosj7=0
L2·cosj2+L3·cosj3-L7·cosj7=0
(3.8)
L2·sinj2+L3·sinj3-L7·sinj7=0
Слагаемые, содержащие угол j3, переносим в правые части уравнения, возводим оба в квадрат и складываем. После преобразования получим:
L32=L22+2·L2·L7·(cosb)+L6
b=![]()
j2=b+j7
b-угол между векторами L2 и L7.
b=52,0259º j2=59,754120
Для определения угла j3 используем любое из уравнений (3.8):
![]()
Уравнения замкнутости 2-го контура BCDB:
L3-L5-L4=0 (3.11)
Cпроецируем (3.11) на оси координат:
![]() L3·cosj3-L5·cosj5-L4·cosj4=0
L3·cosj3-L5·cosj5-L4·cosj4=0
L3·sinj3-L5·sinj5-L4·sinj4=0
Учитывая, что j5=0, получим:
![]() L3·cosj3-L5 -L4·cosj4=0
L3·cosj3-L5 -L4·cosj4=0
(3.12)
L3·sinj3-L4·sinj4=0
j’4=![]() (3.13)
(3.13)
j4=![]()
j4=1800-29,894020=150,105980 (так как 3 четверть)
L5=-L4·cos j4+L3·cosj3 (3.14)
L5=0,3·cosφ4+0,6·cosφ3=0,49617
Для определения положений точек S2 и S4запишем уравнения замкнутости контуров OAS2O BCS4B:
L1+Las2 -Ls2o=0 (3.15)
L3-Lcs4+Ls4b=0 (3.16)
Из этих уравнений находим координаты центров масс звеньев 2 и 4:
![]() S2x=L1·cosj1+Las2·cosj2
S2x=L1·cosj1+Las2·cosj2
(3.17)
S2y=L1·sinj1+Las2·sinj2
![]() S2x=0,09·cos19,99+0,19·cos59,75412=0,18028
S2x=0,09·cos19,99+0,19·cos59,75412=0,18028
S2y= 009·sin19,99+0,19·sin59,75412=0,1949
![]() S4x=L3·cosj3+Lbs4·cosj4
S4x=L3·cosj3+Lbs4·cosj4
(3.18)
S4y=L3·sinj3+Lbs2·sinj4
![]()
S4x=0,3·cos94,58891+0,3·cos150,10598 =0.01590 м
S4y= 0,3·sin94,58891+0,3·sin150,10598=0.20952 м
|
j1 |
j2 |
j3 |
L5 |
j4 |
|
|
Графически |
19.5 |
59.5 |
95.5 |
0.4914 |
150 |
|
Аналитически |
19,99 |
59,75412 |
94,588922 |
0,49617 |
150,10598 |
|
D,% |
2.45 |
0.42 |
0.95 |
0.96 |
0.07 |
Т.к. аналоги скоростей и ускорений не зависят от закона изменения j1, то w1=1 рад/c.
Продифференцируем по j1 уравнение (3.2), получим:
L1·sinj1 -L2·j2’·sinj2-L3·j3’sinj3=0
(3.19)
-L1·cosj1+L2·j2’·cosj2+L3·j3’·cosj3=0
Примем j1’=-1, так как угловая скорость звена 1 направлена по часовой
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.