



























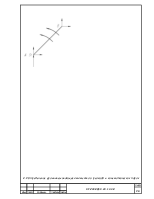















Через конец вектора Vb1 проводим прямую параллельную СВ, это будет направление Vb3/b1 .
С другой стороны точка b участвует во вращательном движении звена 3 относительно точки С.
![]()
![]() Vb3
= Vb3/С2
Vb3
= Vb3/С2
Из полюса плана скоростей – р перпендикулярно СВ, до пересечения с направлением Vb3/в1 строим направление Vb3. Точка пересечения построенных направлений (т. b3) определит отрезки b1b3 = 38 мм аналог Vb3/b1 = b3b1×mv = 0.076 м/с, и pb3=32,8мм – аналог Vb3/c = pb3×mv = 0,065 м/с.
Зная линейную скорость определим угловую:
w3 = Vb3/c / l3 = 0.065 / 0,305 = 0.215 c-1
Полученные значения заносим в табл. 2,4
5. Определяем скорость точки D.
![]() ,
тогда
,
тогда ![]()
Скорость точки D раскладываем на две составляющие вертикальную и горизонтльную. Вертикальная составляющая Vd будет скоростью точки S5.
![]()
определим горизонтальную составляющую
![]()
Заносим полученные данные в табл 2.4
По теореме подобия найдем координаты скоростей центров масс.
VS5 =Ve верт = 0,016 м/с
Откладываем точку S3 на плане скоростей.
![]() , тогда
, тогда ![]() 9.88 мм
9.88 мм
рs3 – аналог скорости центра масс звена 3. В проекциях на оси координат.
ps3x = 9,3мм, s3x = mv×ps2x = 0,018 м/с
ps3y = 3,2мм, s3y = mv×ps2y = 0.006 м/с
2.4. Определение ускорений звеньев механизма
2.4.2. Аналитический метод
Ускорение звеньев механизма аналитическим методом находим дифференцированием выражений скоростей (2,6), (2,7), (2,8) и (2,9) по обобщенной координате j1.
Дифференцируем систему (2,6)
Решая, эту систему относительно неизвестных:
В расчетном положении получим следующие значения:
j2¢¢=-0,139L2¢¢=-0,052. м Заносим в таблицу 2.6.
Дифференцируем уравнение (2,7)
Решаем относительно неизвестных:
Врасчетном положении:l4¢¢ = -0.08
Дифференцируем (2,8), (2,9)
Врасчетном положении:
S3x¢¢ = -0.012, мS3y¢¢ = 0.009, мS5¢¢ = 0.022, м
Значения ускорений в остальных положениях рассчитаны в MathCAD и занесены в таблицу 2.7.
Таблица 2.6
|
Метод |
j2¢¢ |
L2¢¢, м |
L4¢¢, м |
S5¢¢, м |
S3х¢¢’, м |
S3y¢¢, м |
|
Аналитический |
-0.14 |
-0.052 |
-0.03 |
0.022 |
-0.012 |
0.009 |
|
Графический |
0,143 |
0,052 |
0,0304 |
0,023 |
0.012 |
0.009 |
|
отклонение |
2 |
0 |
1,3 |
4,3 |
0 |
0 |
Погрешность - в пределах допустимой. Расчет считаем верным.
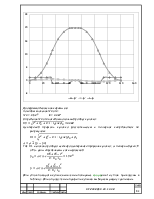
Результаты расчёта аналогов ускорений
Таблица 2,7.
|
φ1 |
φ2'' |
L2'', м |
L4'', м |
S5'', м |
S3x '', м |
S3y '', м |
|
300 |
0,442 |
0,059 |
-0,056 |
0,095 |
0,022 |
-0,038 |
|
330 |
0,168 |
0,024 |
-0,033 |
0,041 |
0,013 |
-0,017 |
|
360 |
0,077 |
0,003 |
-0,027 |
0,027 |
0,011 |
-0,011 |
|
0 |
0,077 |
0,003 |
-0,027 |
0,027 |
0,011 |
-0,011 |
|
30 |
0,046 |
-0,012 |
-0,021 |
0,021 |
0,008 |
-0,008 |
|
60 |
0,016 |
-0,031 |
-0,012 |
0,015 |
0,005 |
-0,007 |
|
90 |
-0,031 |
-0,041 |
0,002 |
0,004 |
-0,001 |
-0,006 |
|
120 |
-0,14 |
-0,052 |
0,03 |
-0,02 |
-0,01 |
0,009 |
|
150 |
-0,288 |
-0,107 |
0,069 |
-0,021 |
-0,028 |
0,0093 |
|
168 |
-0,44 |
-0,154 |
0,107 |
-0,024 |
-0,033 |
0,01 |
|
180 |
-0,544 |
-0,228 |
0,132 |
-0,029 |
-0,053 |
0,011 |
|
210 |
-0,516 |
-0,153 |
0,105 |
-0,011 |
-0,042 |
0,004 |
|
240 |
0,323 |
0,13 |
-0,121 |
0,122 |
0,048 |
-0,049 |
|
270 |
0,781 |
0,061 |
-0,145 |
0,183 |
0,058 |
-0,073 |
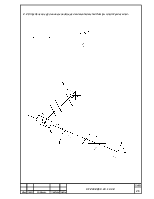
2.4.2. Определение аналогов ускорений исследуемого механизма графическим методом.
![]() Задачу решаем путем
построения плана ускорений, считая ω постоянной величиной.
Задачу решаем путем
построения плана ускорений, считая ω постоянной величиной.
1. Определение ускорения точки B1
Полное ускорение точки B
равно нормальной составляющей ![]() ,
которая направлена по AB к
центру B.
,
которая направлена по AB к
центру B.
![]() =0.1
=0.1
2. Из точки p – полоса плана ускорений – откладываем вектор, изображающий ускорение точки B в виде отрезка pa=100мм
3.
Масштабный коэффициент: mа=![]() /Ра = 0,1/100
= 0,001
(м/с2)/мм
/Ра = 0,1/100
= 0,001
(м/с2)/мм
4. Для определения ускорения точки В записываем два векторных уравнения, рассматривая движение этой точки в начале со первым звеном, а затем с третьим:
![]()
![]()
Нормальные ускорения параллельны звеньям, касательные - перпендикулярные.
Нормальные ускорения вычисляем:
![]() =
0,0132 м/с2
=
0,0132 м/с2
Отрезок, изображающий в мм вектор этого ускорения:
![]() =
13,2 мм.
Вектор
=
13,2 мм.
Вектор ![]() - направлен вдоль ВС
от В к С.
- направлен вдоль ВС
от В к С.
Кориолисово ускорение:![]()
![]() =2ω3
vB3B1=
0,052 м/с2, вектор изображающий
=2ω3
vB3B1=
0,052 м/с2, вектор изображающий ![]() -
b1k=
0,052 μа
=52 мм. направление определим поворотом скорости vB3B1
на 90° по направлению w1.
-
b1k=
0,052 μа
=52 мм. направление определим поворотом скорости vB3B1
на 90° по направлению w1.
Через n2 и к проводим направления вектора касательного ускорения, пересечение которых определяет точку b3.
πb3
= 45,7 мм, ![]() = 0,0457
м/с2 .
= 0,0457
м/с2 .
πn1
= 13.2 мм,
![]() =
0,0132м/с2
.
=
0,0132м/с2
.
n1b3
= 43.7 мм,
![]() =
0,0437м/с2
.
=
0,0437м/с2
.
![]() =
0,0437/0,305
= 0,143 с-2`
=
0,0437/0,305
= 0,143 с-2`
Ускорение центра масс звена3:
По методу подобия.![]() т.о.
получаем точку S3
– конец вектора ускорения центра масс звена 3.
т.о.
получаем точку S3
– конец вектора ускорения центра масс звена 3.
ps3x = 12, as3x = ma×ps3x = 0.012 м/с
ps3y = 9 мм, as3y = ma×ps3y = 0,009 м/с
По методу подобия.![]() т.о.
получаем точку d.Раскладываем πd на
горизонтальную и вертикальную составляющие, вертикальная составляющая и
будет вектором ускорения точкиS5,
а горизонтальная составляющая -L4¢¢:
т.о.
получаем точку d.Раскладываем πd на
горизонтальную и вертикальную составляющие, вертикальная составляющая и
будет вектором ускорения точкиS5,
а горизонтальная составляющая -L4¢¢:
ps5y = 23,3мм, as5y = ma×ps5y = 0.0233 м/с2
ps = 30,4мм, as5y = ma×ps5y = 0.0304 м/с2
3 ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА.
Внутри цикла установившегося движения угловая скорость начального звена машины периодически меняется из-за постоянного изменения нагрузок, что приводит к нежелательной неравномерности движения. Неравномерность движения начального звена характеризуется коэффициентом неравномерности движения [d]. При анализе динамики машины и определении момента инерции маховика Iм вместо реального механизма рассматривают его одномассовую динамическую модель. Динамическая модель механизма состоит из одного, начального звена. К которому приведены силы, движущие моменты Мпд и моменты сопротивления Мпс, действующие на звенья машины, а также все моменты инерции звеньев Iп. Для определении требуемого значения момента инерции маховика Iм запишем уравнения движения звена приведения в форме интеграла энергии для промежутков времени, за которое его угловая сорость изменится от ω0 до ωmax и от ω0 до ωmin
Вычтем из первого второе и учитывая что:
Получим:
Iм = (Сmax–Cmin)/ [d]×w2cp
3.1 Определение параметров динамической модели.
Для построения динамической модели исследуемой машины в качестве звена приведения выбираем звено 1, к которому приводим все силы (моменты), действующие на механизм и моменты инерции подвижных звеньев.
3.1.1 Приведенный момент инерции и его производная.
Приведенный момент инерции определяется по формуле.
![]()
Где n - число подвижных звеньев, массы и моменты инерции которых заданы;
mi - масса i –го звена; Six¢ и Siy¢- проекции на оси координат аналога скорости i –го звена; Ii – момент инерции i –го звена; ji¢- аналог угловой скорости
i –го звена;
Для рассматриваемого механизма в расчетном положении
In =Id (jd¢)2 + Is3 + Is3 (j2¢)2 + m3×((S3x¢)2 + (S3y¢)2) + m5 (L5¢)2
jd¢ = i3н ×(Z5/Z4) = 10.2 - аналог угловой скорости ротора двигателя.
В расчетном положении: In = 1.239 кг м2
Дифференцируя по обобщенной координате j1, находим производную приведенного момента инерции
d In /dj1 = 2[Is3 j2¢j2¢¢+ m5 L5¢L5¢¢+ m3 (S3x¢S3x¢¢ +S3y¢S3y]
В расчетном положении: dIn/dj1=-0.058 кг×м2.
Для остальных положений механизма In и dIn/dj1 рассчитаны
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 Величина
Величина